4.6.12 Replacement of motor, axis 6, IRB 1660ID
Note
After replacement of motors/motor in a manipulator, recalibration is required.
Location of motor axis 6
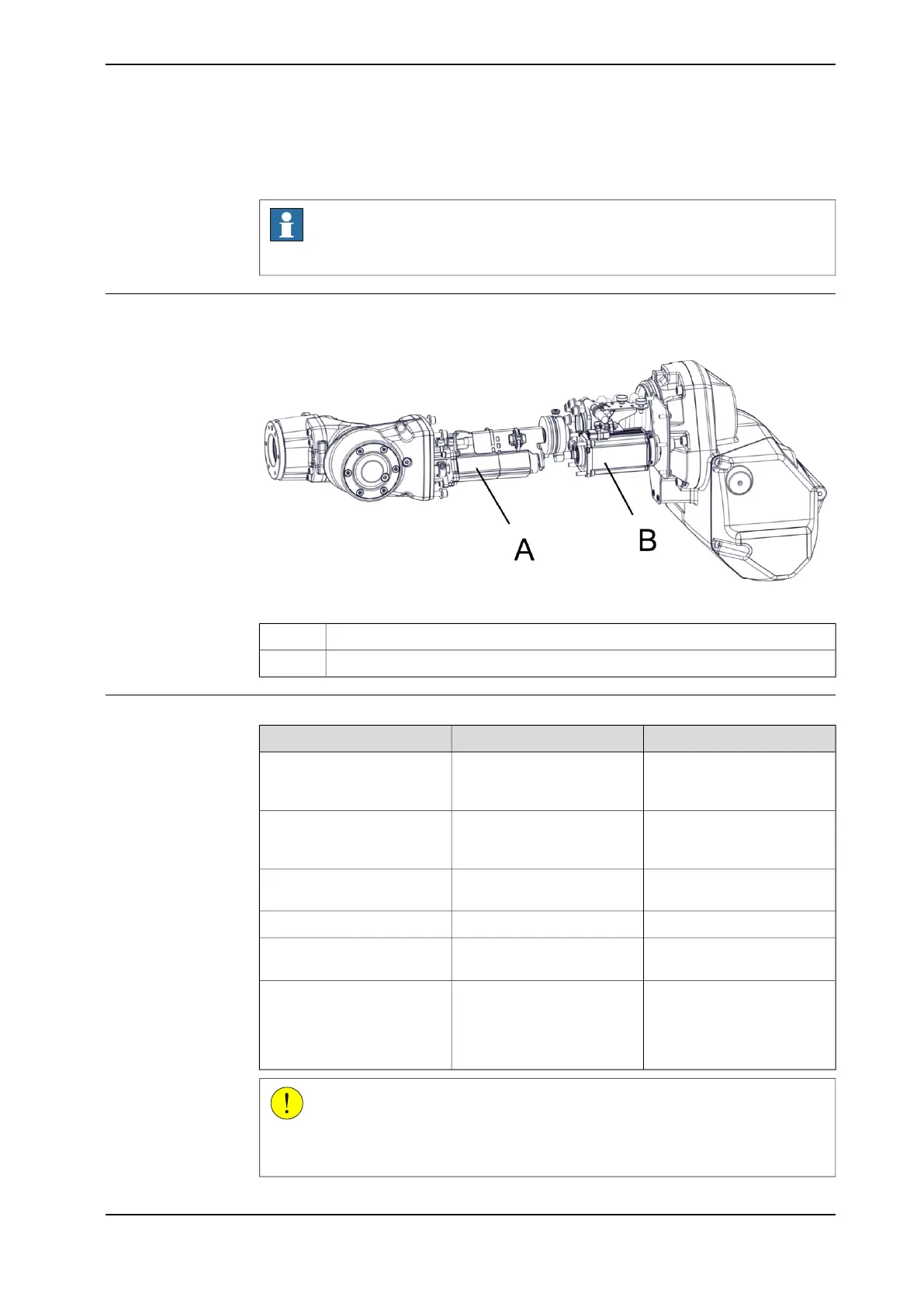
Motor axis 6 is located inside the upper arm tube, as shown in the figure.
xx1500001258
Motor axis 6A
Motor axis 5B
Required equipment
NoteArt. no.Equipment
For spare part number, see:
• Spare part lists on
page 387
Motor, axis 6
For spare part number, see:
• Spare part lists on
page 387
Wrist unit, ID
Always replace with a new
when removed.
3HAA2166-18VK-cover
Loctite 574-Locking liquid
Content is defined in section
Standard tools on page 383.
Standard toolkit
These procedures include
references to the tools re-
quired.
Other tools and procedures
may be required. See refer-
ences to these procedures in
the step-by-step instructions
below.
CAUTION
Always cut the paint with a knife and grind the paint edge when disassembling
parts. See Cut the paint or surface on the robot before replacing parts on page 159.
Continues on next page
Product manual - IRB 1600/1660 319
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.6.12 Replacement of motor, axis 6, IRB 1660ID

 Loading...
Loading...






