Chapter 4 Parameters
4-79
Settings Functions Descriptions
MI=d1
Run/Stop
1
1
1010 =10
2
corresponds to
Pr.04-24
11
0
0
0
00
11 1
1011 =11
2
corresponds
to Pr.04-25
MI=d2
MI=d3
MI=d4
MI=d36
Writing the motor position
into the Pr.04-25
Writing the motor position
into the Pr.04-24
37
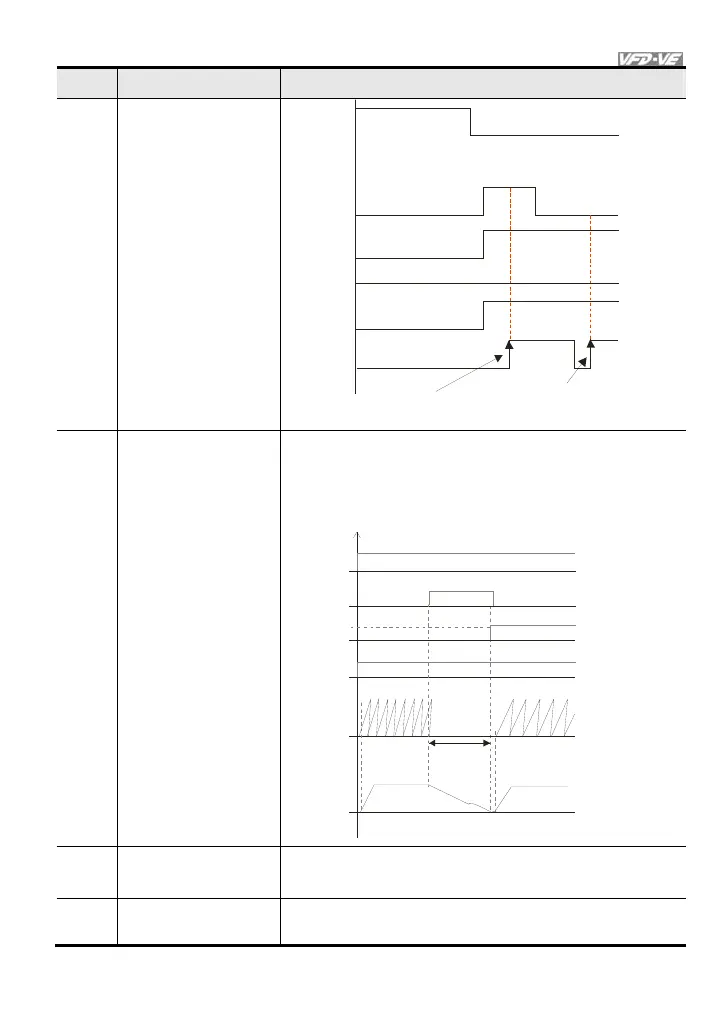
Enable pulse position
input command
When Pr.00-20 is set to 4 or 5 and this contact is ON, the input
pulse of PG card is position command. When using this function,
it is recommended to set Pr.10-23 to 0.
Example: When it is used with MI=d35 for returning home,
please refer to the following diagram.
RUN
MI=d35
MO=d39
MI=d37
pulse
command
internal
positioning
output
frequency
Time
38
Disable write EEPROM
function
When this contact is ON, you can’t write into EEPROM.
39
Torque command
direction
When the torque command source is AVI or ACI and this
contact is ON, it is negative torque.