8 Description of Function Codes NICE3000
new
User Manual
- 198 -
The speed dynamic response characteristics in vector control can be adjusted by setting the proportional
gain and integral time of the speed regulator.
To achieve a faster system response, increase the proportional gain and reduce the integral time. Be
aware that this may lead to system oscillation.
The recommended adjustment method is as follows:
If the default setting cannot meet the requirements, make proper adjustment. Decrease the proportional
gain rst to ensure that the system does not oscillate, and then reduce the integral time to ensure that the
system has quick response but small overshoot.
If both F2-02 (Switchover frequency 1) and F2-05 (Switchover frequency 2) are 0, only F2-03 and F2-04
are valid.
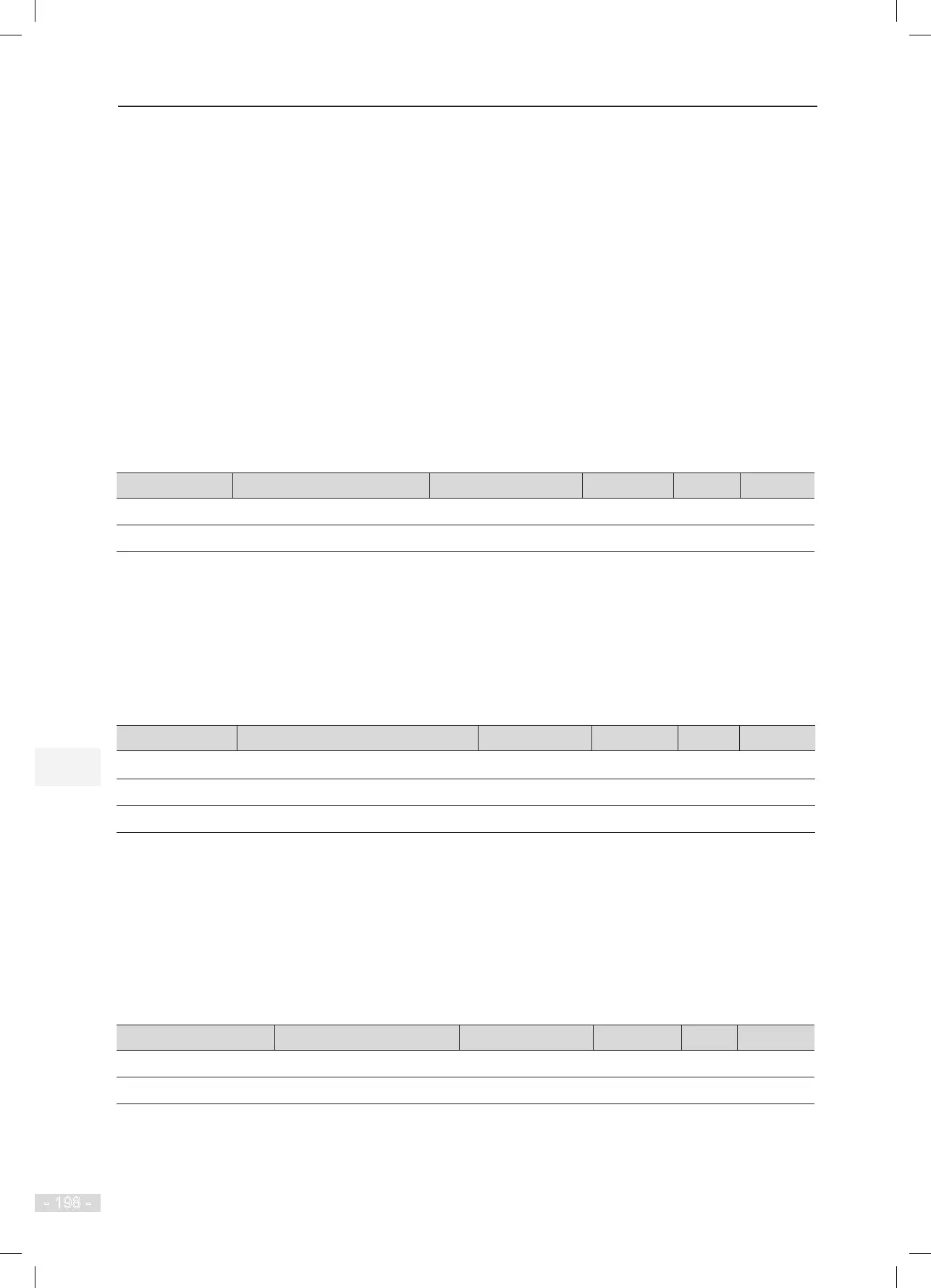
8.3.2 Current Loop PI Parameters
Function Code Parameter Name Setting Range Default Unit Property
F2-06
Current loop Kp1 (torque) 10–500 60 -
★
F2-07
Current loop Kp1 (torque) 10–500 30 -
★
These two parameters are regulation parameters for the torque axis current loop.
These parameters are used as the torque axis current regulator in vector control. The best values of the
parameters matching the motor characteristics are obtained by means of motor auto-tuning. You need not
modify them generally.
8.3.3 Position Lock PI Parameters
Function Code Parameter Name Setting Range Default Unit Property
F2-11
Position lock current coefcient 0.20–50.0 15 -
★
F2-12
Position lock speed loop Kp 0.00–2.00 0.5 -
★
F2-13
Position lock speed loop Ki 0.00–2.00 0.6 -
★
These parameters are used to adjust automatic pre-torque compensation in the case of no-load-cell. The
no-load-cell startup function is enabled when F8-01 (Pre-torque selection) is set to 2 (Automatic pre-torque
compensation).
Decrease the values of these parameters in the case of car lurch at startup, and increase the values in the
case of rollback at startup. For details, see the description of section 6.1.6.
8.3.4 Torque Acceleration/Deceleration Time Setting
Function Code Parameter Name Setting Range Default Unit Property
F2-16
Torque acceleration time 1–500 1 ms
★
F2-17
Torque deceleration time 1–500 350 ms
★
These two parameters are used to set the acceleration time and deceleration time of the torque current.
●
If the motor has abnormal sound when the current is applied at startup, increase the value of F2-
16 to eliminate the abnormal sound.