Moog Animatics SmartMotor™ Developer's Guide,Rev. L
Page 884 of 909
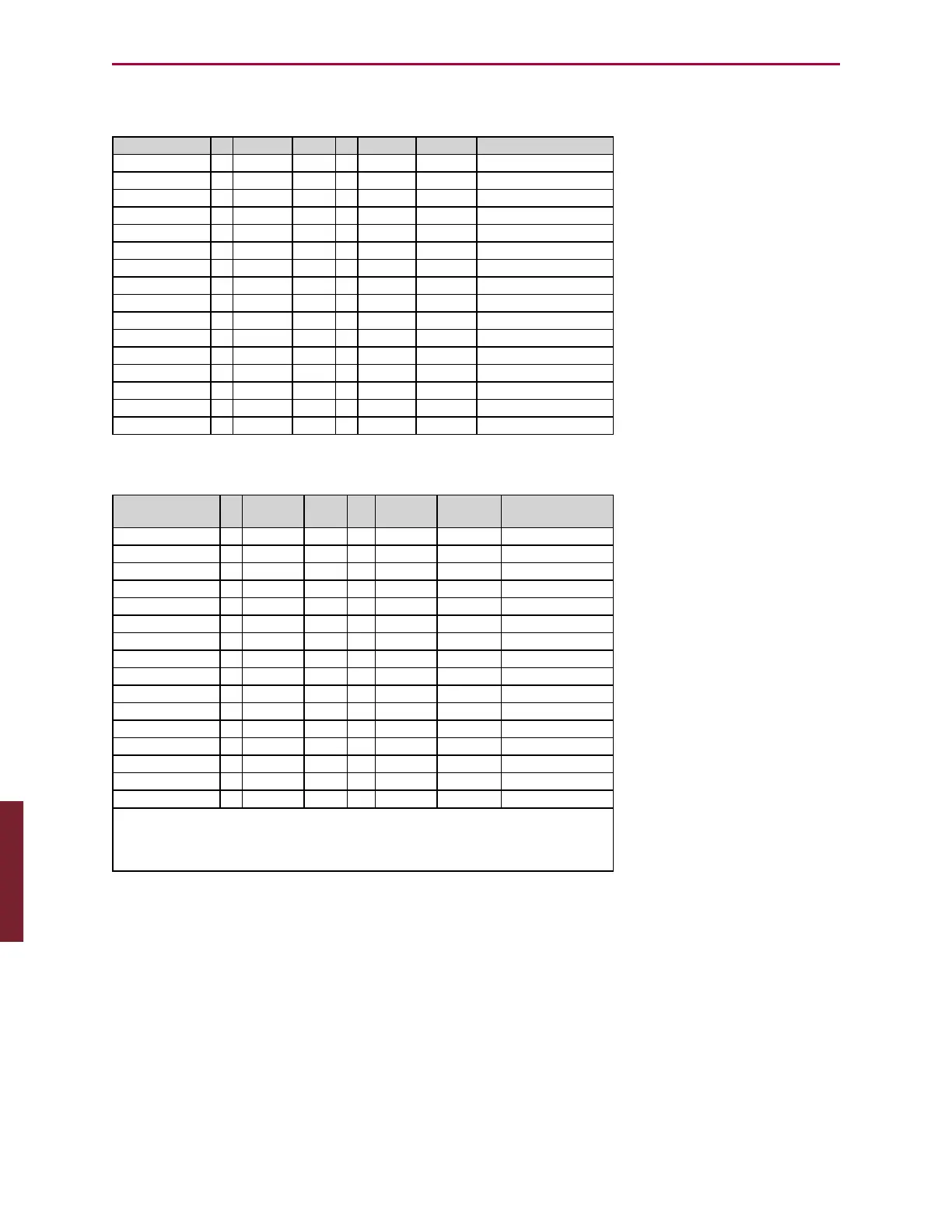
Status Word 8: Cam Support
Description Bit To Clear Value Bit To read Assign Related Commands
Cam User Bit 0 1 0 RB(8,0) =B(8,0) CTW()
Cam User Bit 1 2 1 RB(8,1) =B(8,1) CTW()
Cam User Bit 2 4 2 RB(8,2) =B(8,2) CTW()
Cam User Bit 3 8 3 RB(8,3) =B(8,3) CTW()
Cam User Bit 4 16 4 RB(8,4) =B(8,4) CTW()
Cam User Bit 5 32 5 RB(8,5) =B(8,5) CTW()
Cam Mode 0 64 6 RB(8,6) =B(8,6) MCE()
Cam Mode 1 128 7 RB(8,7) =B(8,7) MCE()
IP User Bit 0 256 8 RB(8,8) =B(8,8)
IP User Bit 1 512 9 RB(8,9) =B(8,9)
IP User Bit 2 1024 10 RB(8,10) =B(8,10)
IP User Bit 3 2048 11 RB(8,11) =B(8,11)
IP User Bit 4 4096 12 RB(8,12) =B(8,12)
IP User Bit 5 8192 13 RB(8,13) =B(8,13)
IP Mode 0 16384 14 RB(8,14) =B(8,14)
IP Mode 1 32768 15 RB(8,15) =B(8,15)
Status Word 10: RxPDO Arrival Notification
Description Bit To Clear Value Bit To read Assign
Related Com-
mands
Master enabled 1 0 RB(10,0) =B(10,0)
RxPDO 1 arrived Z(10,1) 2 1 RB(10,1) =B(10,1)
RxPDO 2 arrived Z(10,2) 4 2 RB(10,2) =B(10,2)
RxPDO 3 arrived Z(10,3) 8 3 RB(10,3) =B(10,3)
RxPDO 4 arrived Z(10,4) 16 4 RB(10,4) =B(10,4)
RxPDO 5 arrived Z(10,5) 32 5 RB(10,5) =B(10,5)
Reserved 64 6 RB(10,6) =B(10,6)
Reserved 128 7 RB(10,7) =B(10,7)
Reserved 256 8 RB(10,8) =B(10,8)
Reserved 512 9 RB(10,9) =B(10,9)
Reserved 1024 10 RB(10,10) =B(10,10)
Reserved 2048 11 RB(10,11) =B(10,11)
Reserved 4096 12 RB(10,12) =B(10,12)
Reserved 8192 13 RB(10,13) =B(10,13)
Reserved 16384 14 RB(10,14) =B(10,14)
Reserved 32768 15 RB(10,15) =B(10,15)
The user program should clear these status bits with a Z(10,bit) command, where bit is
values 1–5, after the event hander part of the user program is executed. Bit 0 cannot
be cleared—it is an indication of the master status.
NOTE: The ZS command will have no effect on these bits.
Appendix: Status Word 8: Cam Support