Monitoring functions
SIMOCODE pro
GWA 4NEB 631 6050- 22 DS 03
5-11
5.4 Cos phi monitoring
Description
Cos phi monitoring monitors the load condition of inductive loads. The main
field of application is for asynchronous motors in 1-phase or 3-phase
networks with loads that fluctuate significantly. The power factor fluctuates
more than either the motor current or the active power does, particularly in
the low-end performance area of a motor. Therefore, power factor
monitoring is particularly suitable for distinguishing between non-load
operation and faults, e.g. a broken drive belt or drive shaft. If the set trip
level or warning level is undershot, a signal is generated or the motor is
switched off, depending upon the setting.
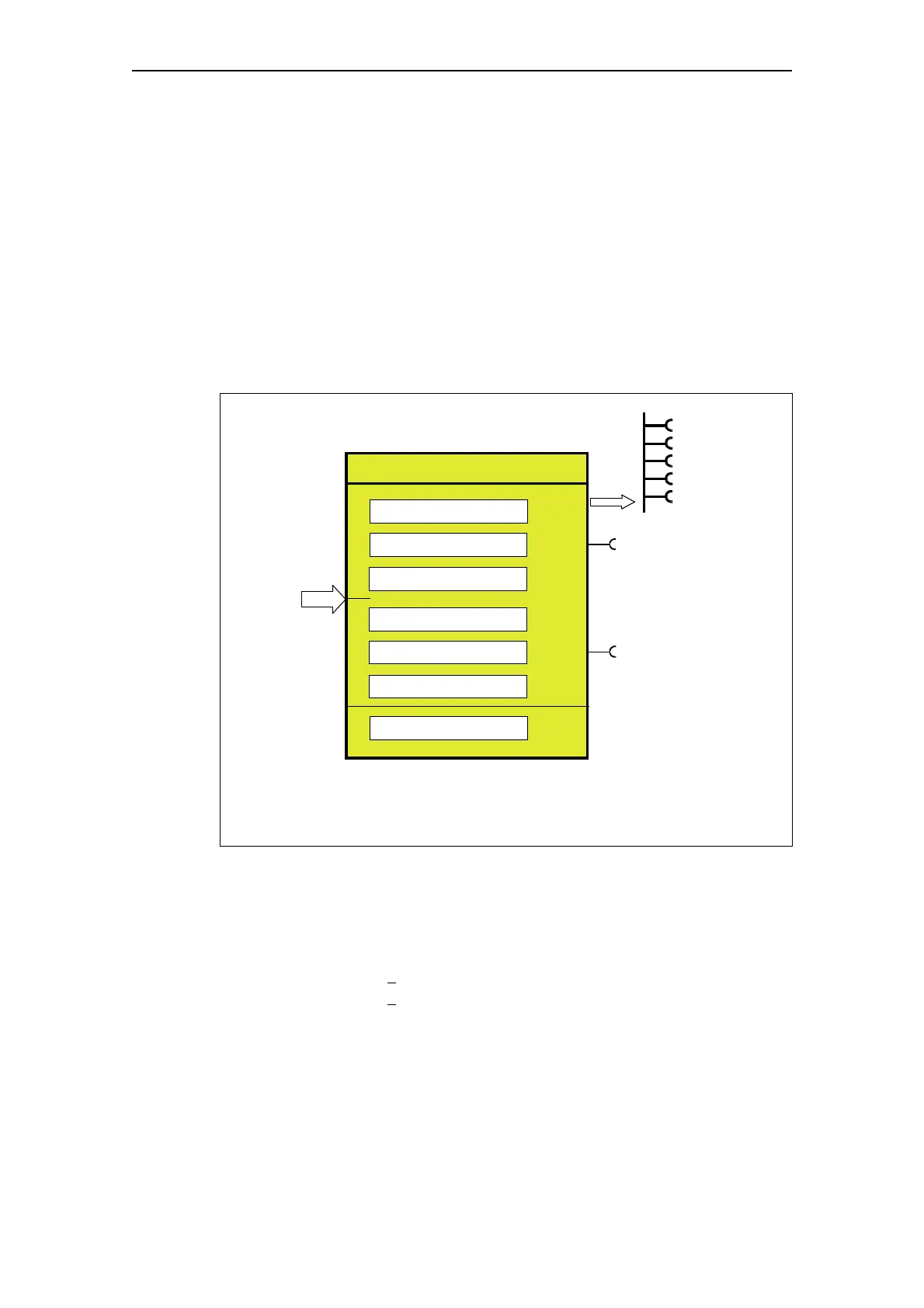
Fig. 5-5: "Cos Phi Monitoring" function block
Trip level, warning level
You can parameterize two different response levels (trip level/warning level)
for cos phi monitoring.
0 % = cos phi = 0.00
50 % = cos phi = 0.50
100 % = cos phi = 1.00
Trip level: 0 - 100 %
Warning level: 0
- 100 %
Trip level
Response
Delay
Warning level
Response
Delay
Event
See
Ta b l e 5 - 9
See
Ta b l e 5 - 10
Cos phi monitoring
- Trip level cos phi <
Event
- Warning level cos phi <
Tripping
QE1
QE2
QE3
QE4
QE5
Cos phi from
Current/voltage
measuring module
Hysteresis
1)
1)
Hysteresis for voltage, cos phi, power
(see "Voltage Monitoring" function block)