When telegrams 7 and 9 are used, the direct setpoint input function can be congured with
t
he PROFINET control word SATZANW.15:
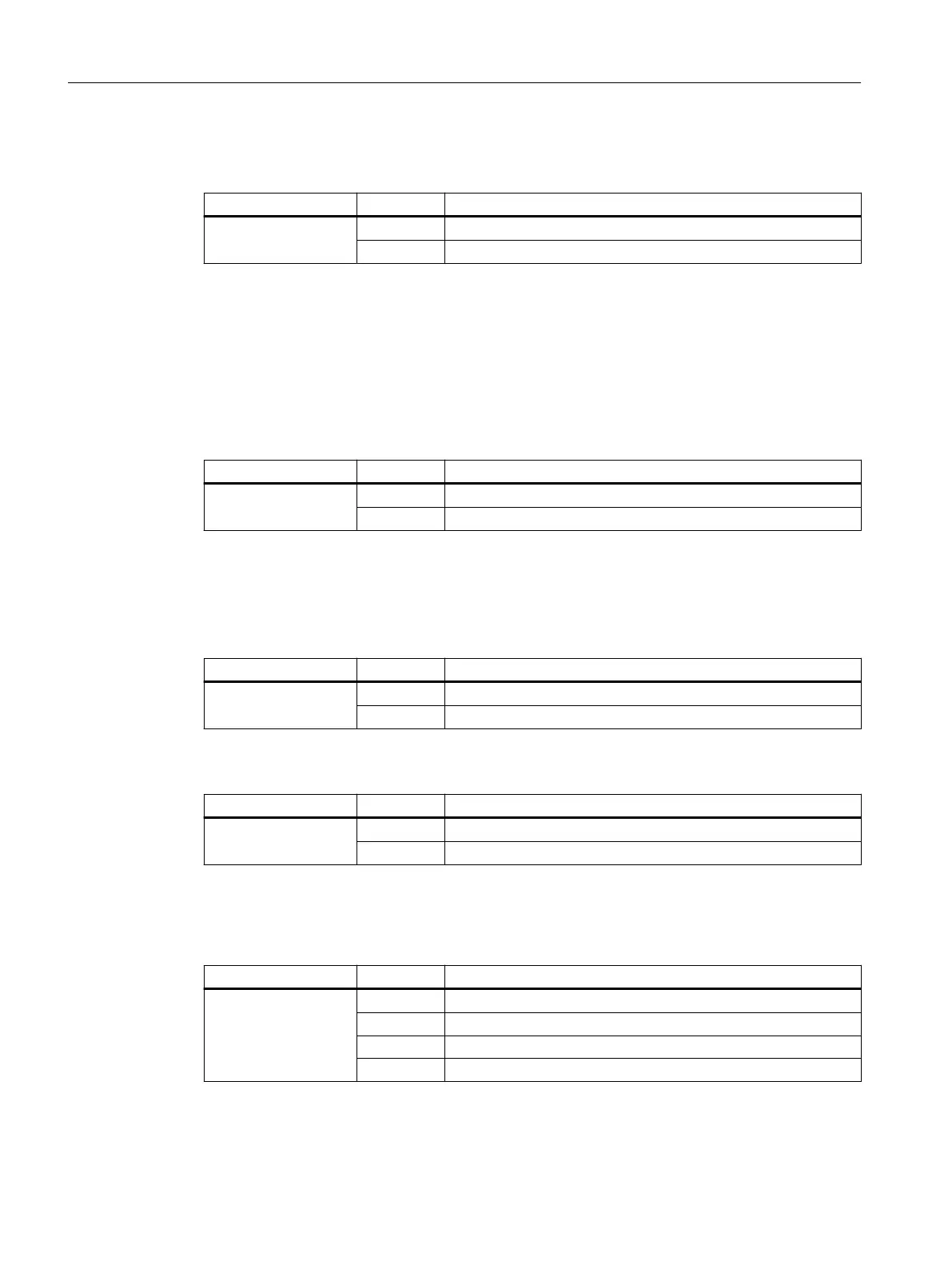
Control word Signal Description
SATZANW.15 1 MDI selection.
0 Traversing block selection.
Selecting a working mode
In "Positioning" mode, the par
ameters (position, velocity, acceleration and deceleration) can
be used to carry out absolute or relative positioning.
In "Setting-up" mode, using parameters (velocity, acceleration and deceleration) endless
closed-loop position control behavior can be carried out.
When telegrams 111 and 112 are used, select a working mode with the PROFINET control
word POS_STW1.14:
Control word Signal Description
POS_STW1.14 1 Signal setting-up selected.
0 Signal positioning selected.
1)
1)
Telegr
ams 7 and 9 can only work in signal positioning mode.
Selecting a positioning type in signal positioning mode
When telegrams 111 and 112 are used, select a positioning type with the PROFINET control
word POS_STW1.8:
Control word Signal Description
POS_STW1.8 1 Absolute positioning is selected.
0 Relative positioning is selected.
When telegram 9 is used, select a positioning type with the PROFINET control word
MDI_MOD.0:
Control word Signal Description
MDI_MOD.0 1 Absolute positioning is selected.
0 Relative positioning is selected.
Selecting an absolute positioning direction in signal positioning mode
When telegr
ams 111 and 112 are used, select an absolute positioning direction with the
PROFINET control words POS_STW1.9 and POS_STW1.10:
Control word Signal Description
POS_STW1.9
POS_STW1.10
0 A
bsolute positioning through the shortest distance.
1 Absolute positioning/MDI direction selection, positive.
2 Absolute positioning/MDI direction selection, negative.
3 Absolute positioning through the shortest distance.
Functions
10.6Basic positioner (EPOS)
SINAMICS S200 PROFINET servo drive system with SIMOTICS S-1FL2
392 Operating Instructions, 11/2023, FW V6.3, A5E51646752B AB