Fixed Waypoint You can add a fixed waypoint to your robot program, when you add a Move
command. There is no difference, if the Move command is a MoveJ, a
MoveL or a MoveP.
To add a fixed waypoint to a robot program
1. In the Program tab, tap Basic.
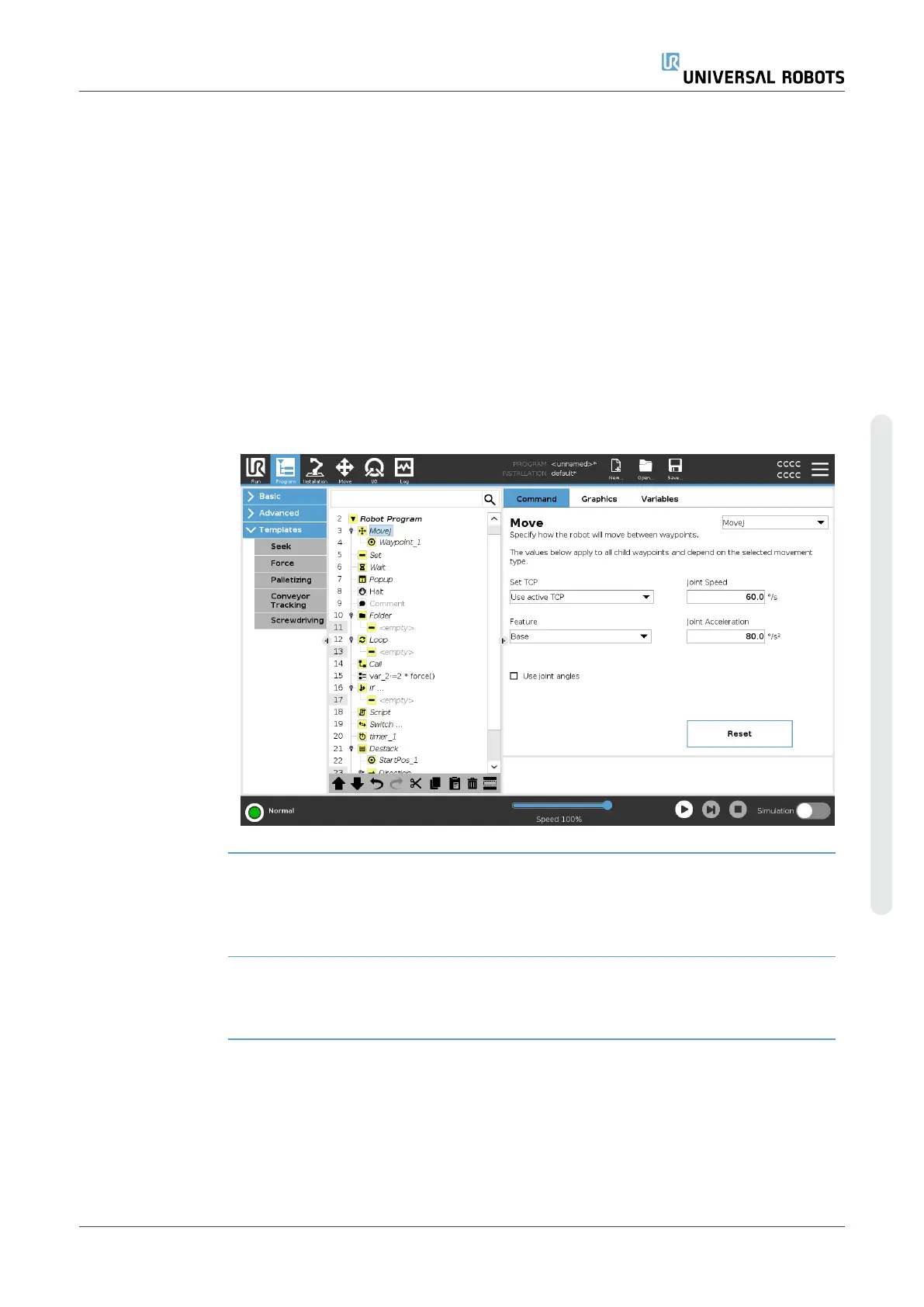
2. Add a move command
3. Select the automatically generated waypoint
a. Notice the selector is automatically set to
4.
Tap to access the
Move tab
5. Set the waypoint
6.
Tap the check mark to save the waypoint and return to the
Program tab
Example When you are removing a work piece from a chuck in a machine tending
application, make the waypoint a fixed position to avoid any contact with
equipment.
1
1
In machine tending, the chuck holds the tool performing work on a workpiece. For example, the
chuck is the part of a drill that attaches to the drill bit.
User Manual 199 UR16e
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.