Detail The robot starts the circular movement from its current position, or start
point, and moves through a ViaPoint specified on the circular arc, to an
EndPoint that completes the circular movement.
A mode is used to calculate tool orientation, through the circular arc.
The mode can be:
•
Fixed: only the start point is used to define the tool orientation.
•
Unconstrained: the start point transforms to the EndPoint to define
tool orientation.
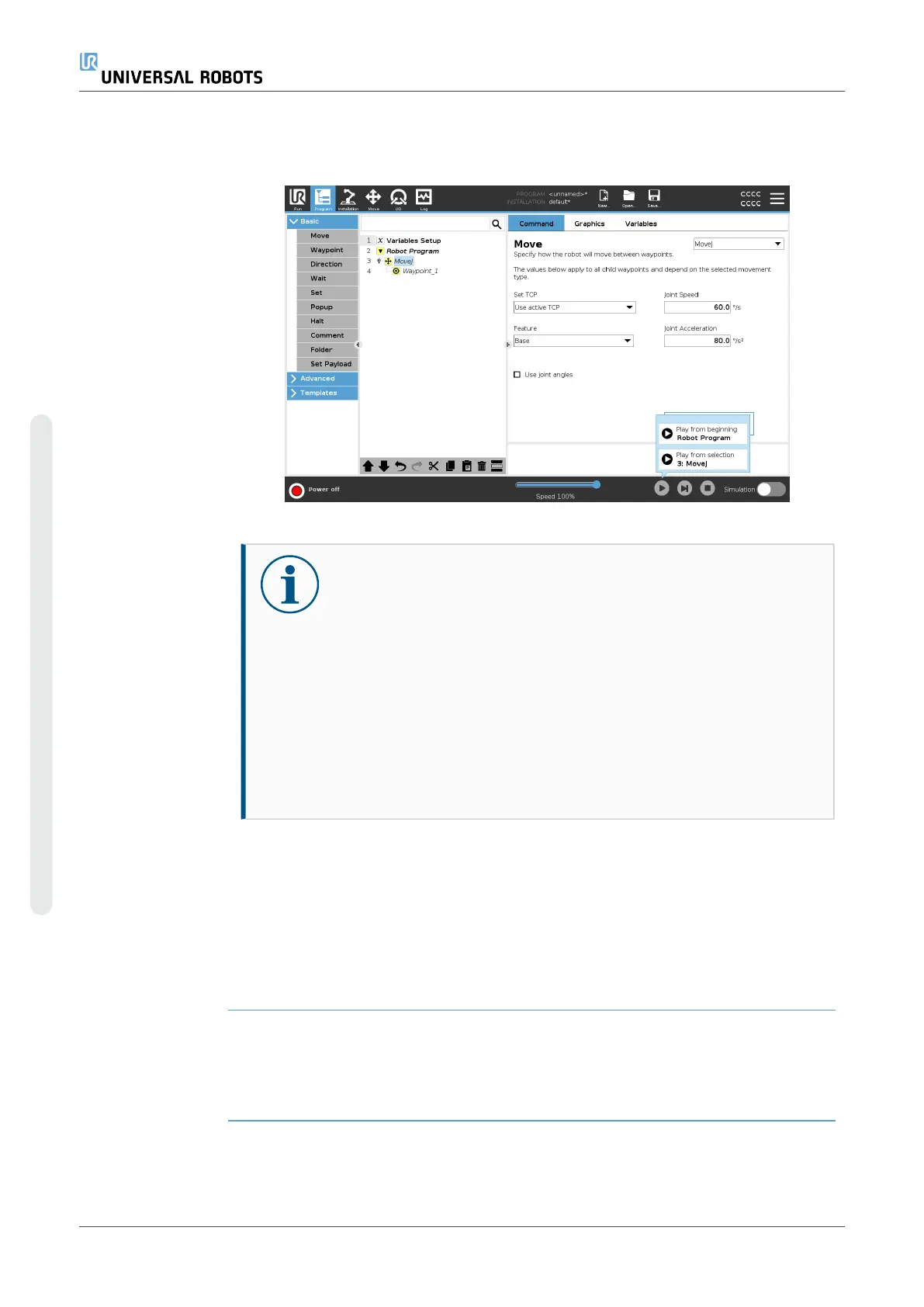
Move pane
Description The different feature options in the Move pane allow you to add detail to a
Move and the attached waypoint/s.
Use these options to customize your program
See the Move pane features below:
Move: Set TCP Use this setting, if you need to change TCP during the robot program
execution. This is useful if you need to manipulate different objects in the
robot program.
The way the robot moves is adjusted depending on which TCP is set as an
active TCP.
Ignore Active TCP allows this movement to be adjusted in relation to the
Tool Flange.
UR16e 190 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.