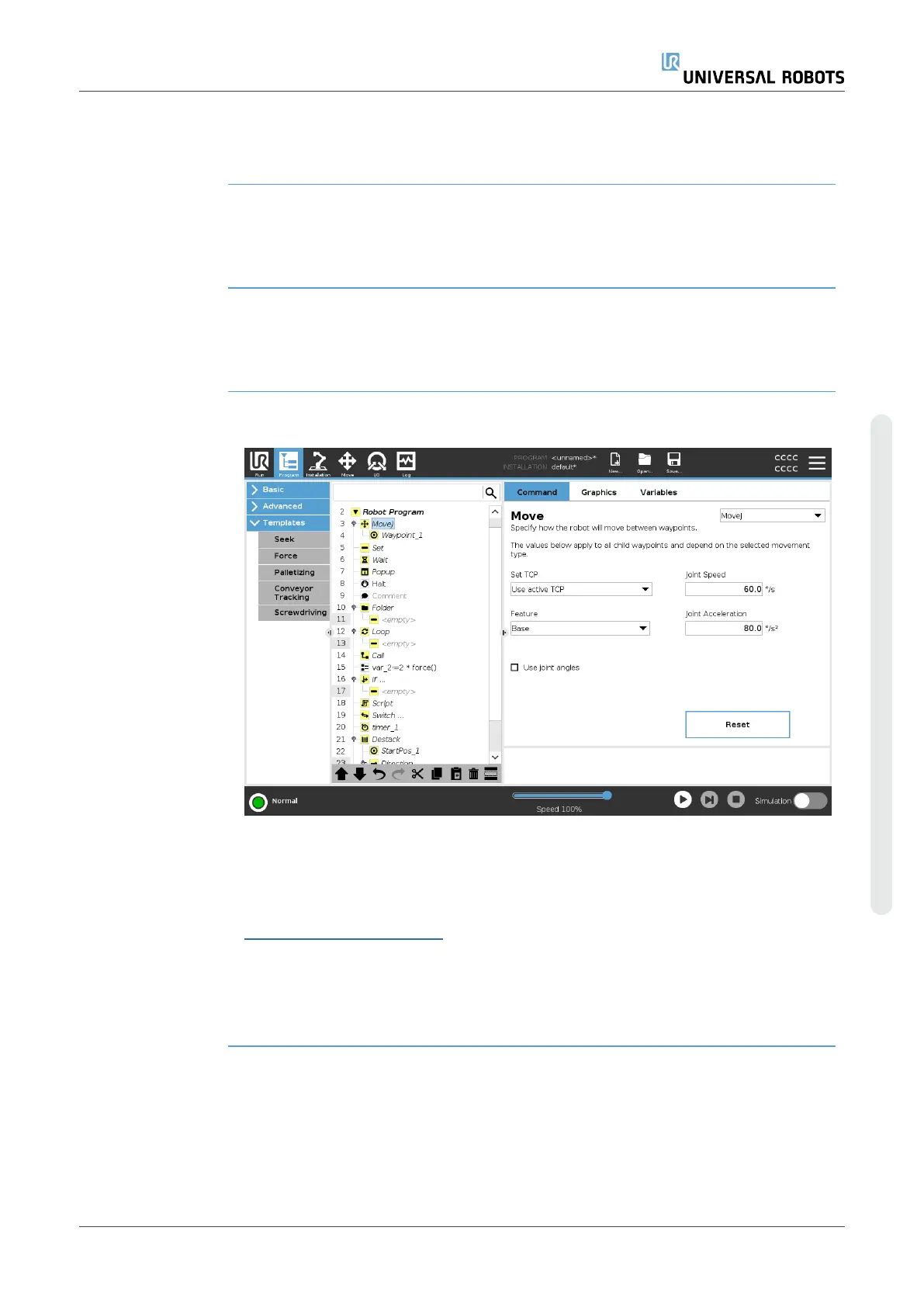
To name a waypoint 1. Make sure you are positioned on the Command tab on the right side
of the screen
2. Select the waypoint you wish to rename
3.
Tap the Rename button
4. Type the new name
5. Tap Submit to save the new name
Tip In a large robot program, you can often have more than 50 waypoints, so
create a naming rule that makes sense to you.
Linking Waypoints By selecting the link icon, waypoints are linked and share position
information.
Detail Other waypoint information such as blend radius, tool/joint speed and
tool/joint acceleration is configured for individual waypoints even though
they may be linked.
Stop at this point You configure the robot program to stop at this waypoint. The robot will
decelerate moving towards this point and continue to the next waypoint.
Use Stop at this
point
1. Select the waypoint you wish to modify
2.
On the right side of the screen, select
User Manual 195 UR16e
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.