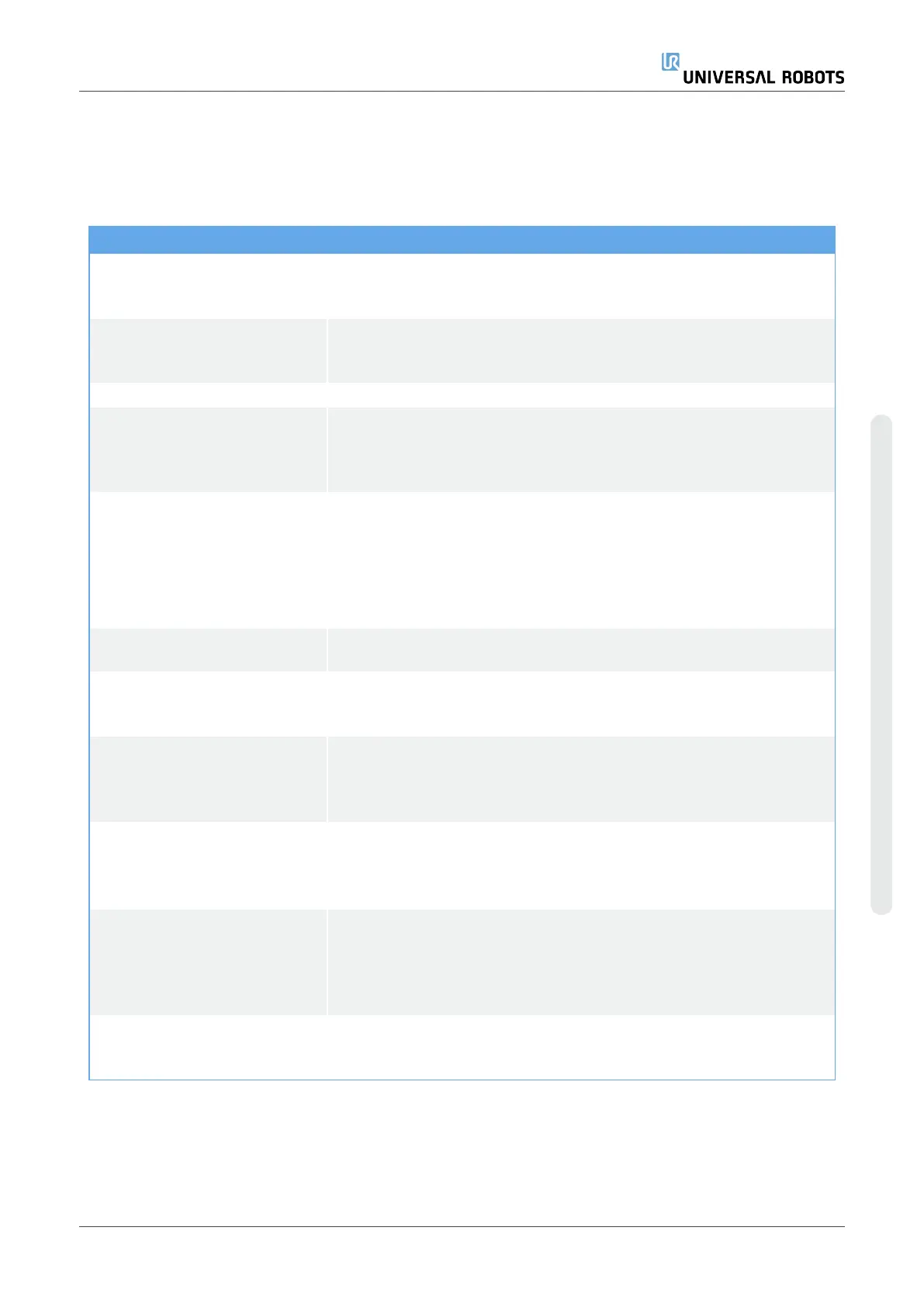
SF# and
Safety
Function
Description What Happens PFH
D
Affects
SF10
UR Robot
Estop
Output
When configured for a Robot
<Estop> output and there is a
robot stop, the dual outputs
are LOW. If there is no Robot
<Estop> Stop initiated, dual
outputs are high. Pulses are
not used but they are
tolerated.
These dual outputs change
state for any external Estop
that is connected to
configurable safety inputs
where this input is configured
as an Emergency Stop input.
For the integrated functional
safety rating with an external
safety-related control system,
add the PFHD of this safety-
related output to the PFHD of
the external safety-related
control system.
For the Estop Output,
validation is performed at the
external equipment, as the
UR output is an input to this
external Estop safety function
for external equipment.
NOTE: If the IMMI (Injection
Moulding Machine Interface)
is used, the UR Robot Estop
output is NOT connected to
the IMMI. There is no Estop
output signal sent sent from
the UR robot to the IMMI.This
is a feature to prevent an
unrecoverable stop condition.
Dual outputs go low in
event of an Estop if
configurable outputs are
set
1.8E-07
External
connection
to logic
and/or
equipment
User Manual 87 UR16e
2.Part I Hardware Installation Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.