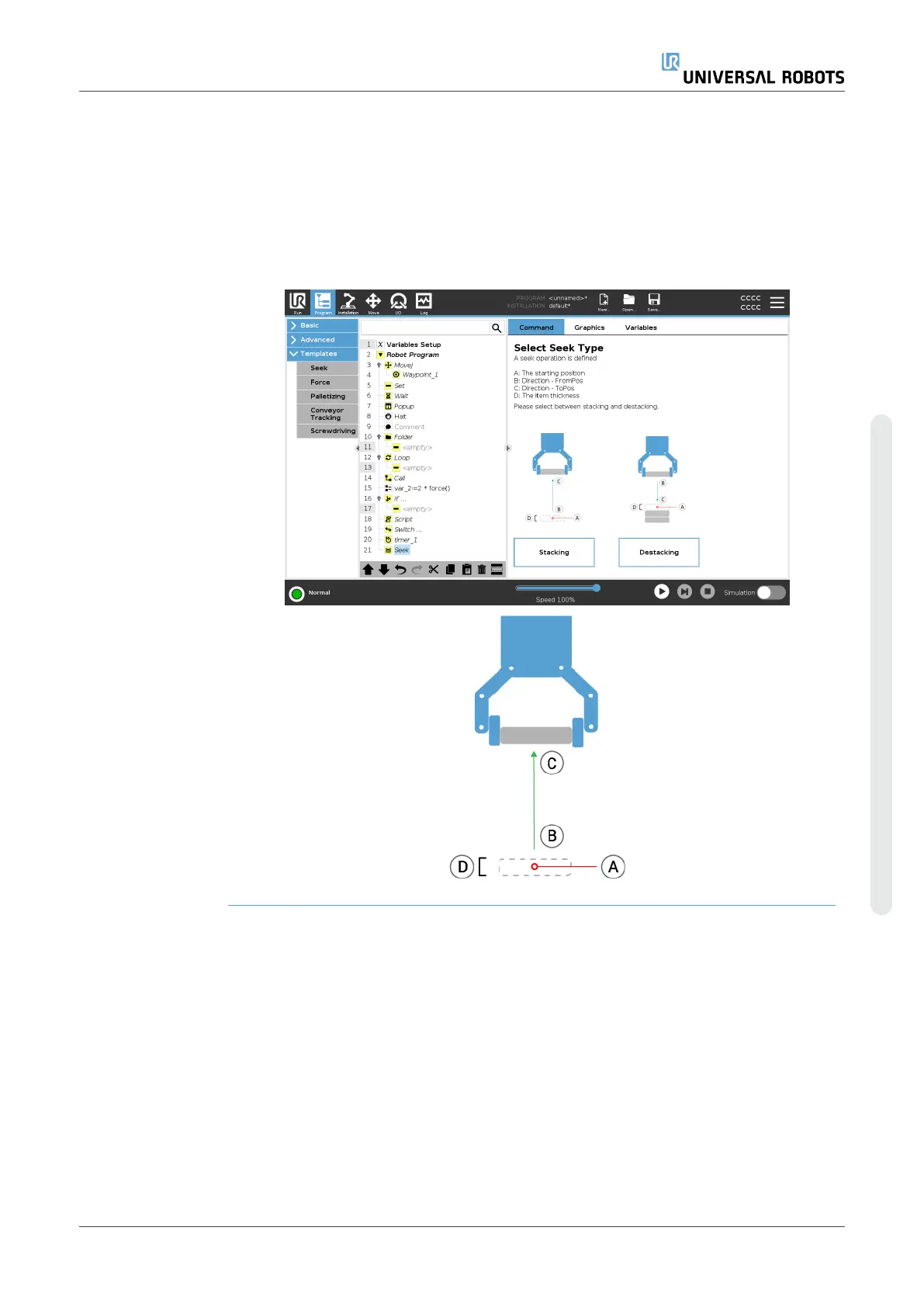
Stacking During Stacking, the robot arm moves to point
A
, then moves
opposite
the
direction to search for the next stack position. When the next stack position
is found, the robot remembers it and performs the special sequence.
In subsequent rounds, the robot starts the search from the remembered
position, incremented by the item's thickness along the direction.
Stacking is complete when the stack height is more than some defined
number, or when a sensor gives a signal.
User Manual 251 UR16e
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.