13.3 CPU Unit
13-16
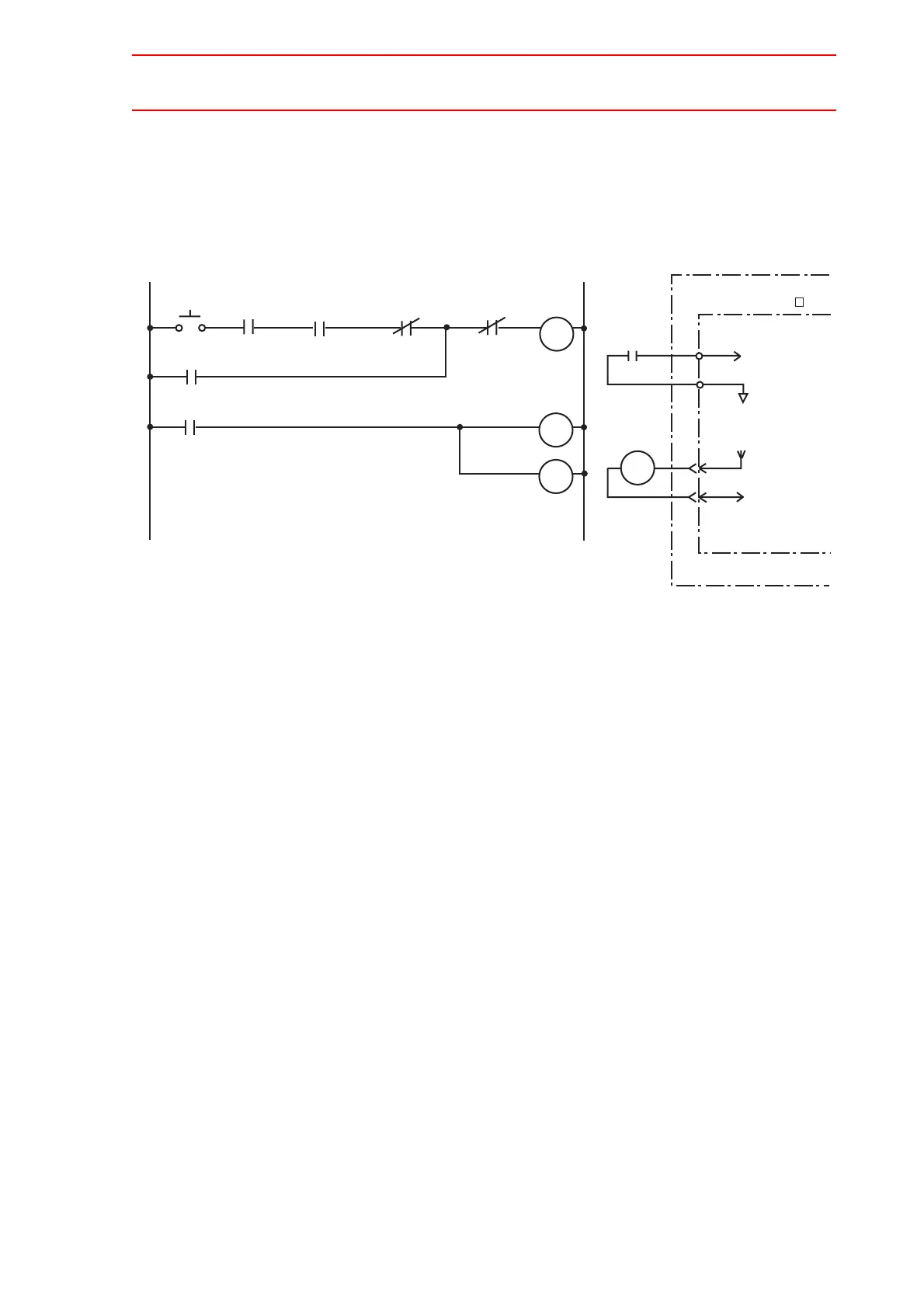
Example of Start Sequence Circuit from External Device
Only the rising edge of the external start signal is valid. This signal starts the manipulator.
Reset this signal with the interlock configuration that determines if operation can start and with
the playback (RUNNING) signal confirming that the manipulator has actually started moving.
External Start
Input
(20010)
Running Output
(30010), etc.
+24VU
OVU
-B7
-B1
-B8
-B18
X6
Running, etc.
X4
Ex. Start
Command
CN09
NX100
JZNC-NIF01
Robot I/F Unit
Note: Number in ( ) means output signal number assigned to NIO01.
PL
X5
Running
Confirmation
Running
X6 (30010)
X3
X4
Start
(Command)
X5
Running
Confirmation
Alarm/Error
Occuring
(30013)
Play mode
select
(30016)
While
Servo ON
(30011)
Run PB
 Loading...
Loading...















