8.4 ARM Control
8-33
Robot Setup Condition
Fulfill the following robot setup condition to enable the ARM control.
• Robot installation angle
• S-head payload
• U-arm payload
Robot installation angle
The angle of the manipulator installed relative to ground is set in ANGLE REL. TO GROUND
to calculate the gravity moment which loads to each axis of the manipulator.
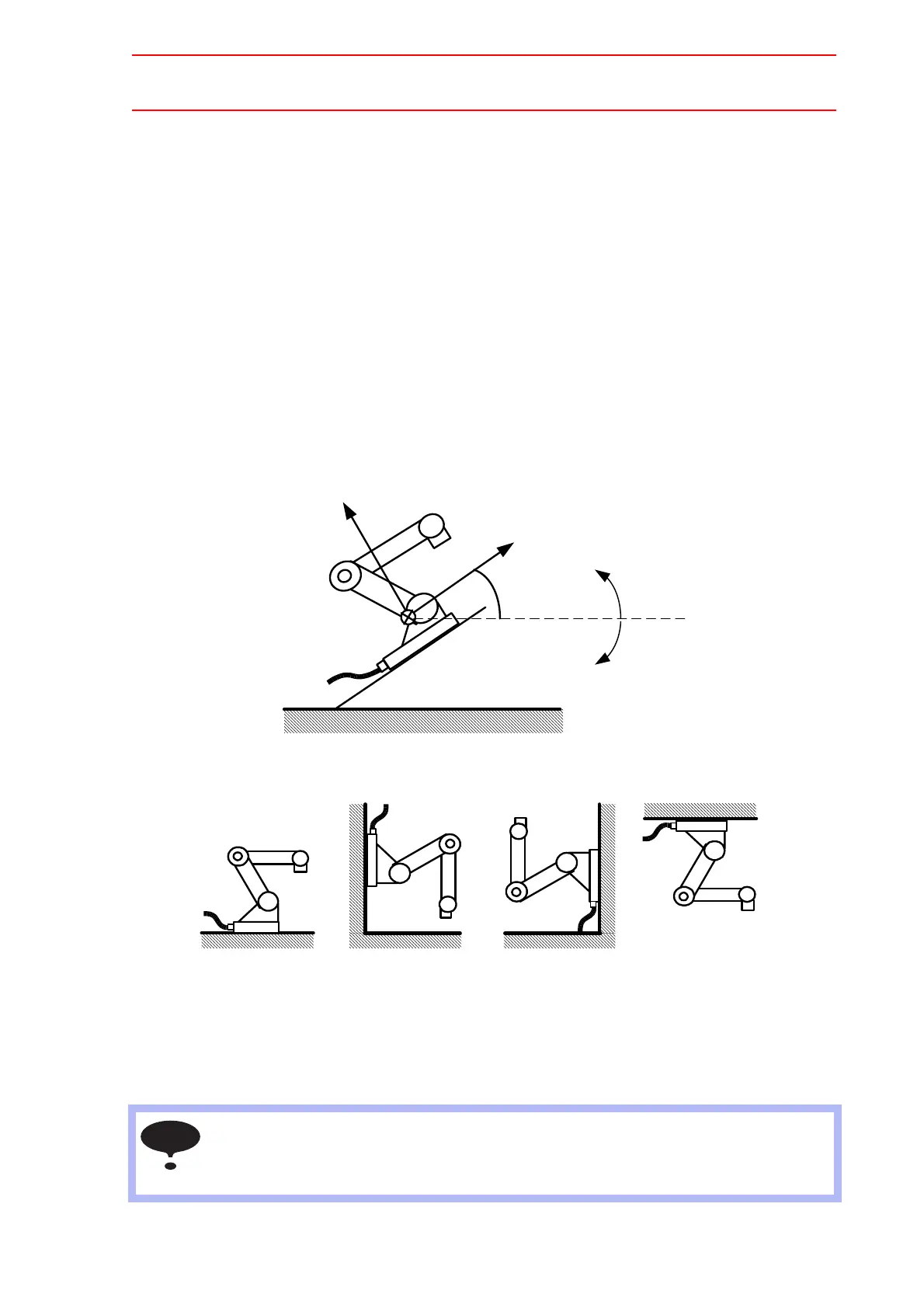
The robot installation angle sets how much X axis of the robot coordinates has inclined with
the ground around Y axis of the robot coordinates. The direction of + in the U axis operation
from the home position posture of the manipulator becomes direction of + of the robot installa-
tion angle. Therefore, the robot installation angle for a vertical downward wall mount specifica-
tion becomes -90 degrees.
<Example>
If the robot installation angle is not correctly set, the manipulator cannot be properly con-
trolled. Therefore, make sure to set the value correctly, paying special attentions to the direc-
tion “+” or “-”.
Only rotation angle around Y axis of the robot coordinates can be set in the robot installa-
tion angle.
Contact YASKAWA representative when robots is installed to incline Y axis of the robot
coordinates relative to ground.
Robot
installation
Angle
+
-
X
Z
Y
0 degrees -90 degrees +90 degrees 180 degrees
NOTE

 Loading...
Loading...














