8.1 Home Position Calibration
8-9
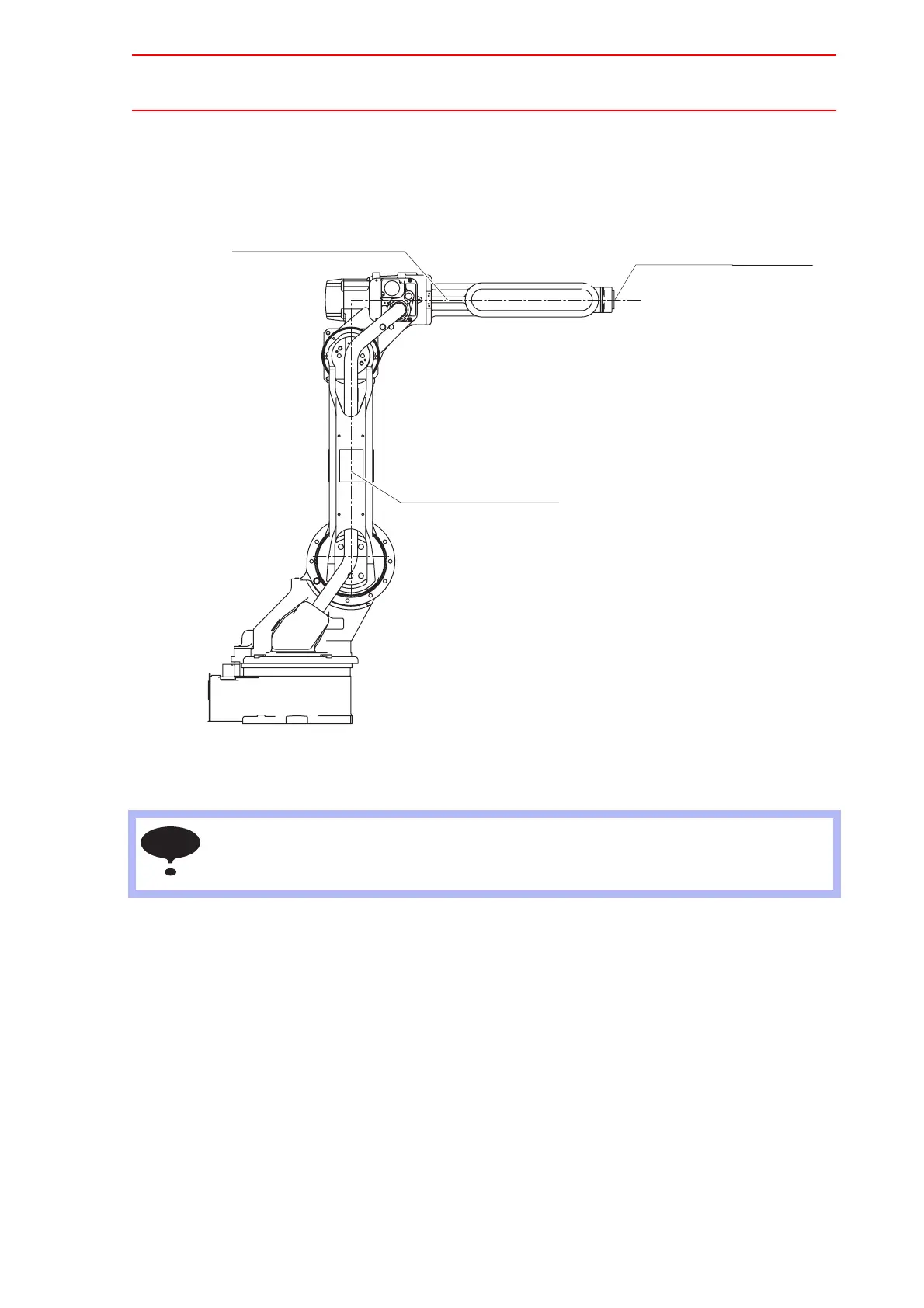
8.1.3 Home Position of the Robot
In case of HP6, the home position are as follows.
Other manipulator models have different positions. Always refer to "MANIPULATOR
INSTRUCTIONS" for the correct manipulator model.
B-axis center line angle against
U-axis center line (-0°).
U-axis angle against horizontal
line on the ground (-0°).
L-axis angle against vertical
line to the ground(-0°).
NOTE

 Loading...
Loading...














