8.1 Home Position Calibration
8-3
• All the axes can be moved at the same time: Recalibrate the home position by moving all
the axes together if changing the combina-
tion of manipulator and circuit board.
• Axes can be moved individually: Recalibrate the home position for the individual axes that
were affected by the replacement, if replacing the motor
or absolute encoder.
If the absolute data of its posture for the home position is already known, set the absolute data
again after completing home position registration.
8.1.2 Calibrating Operation
Registering All Axes at One Time
Home Position
The home position is the pulse value "0" for each axis and its posture. See "8.1.3 Home
Position of the Robot".
Operation Explanation
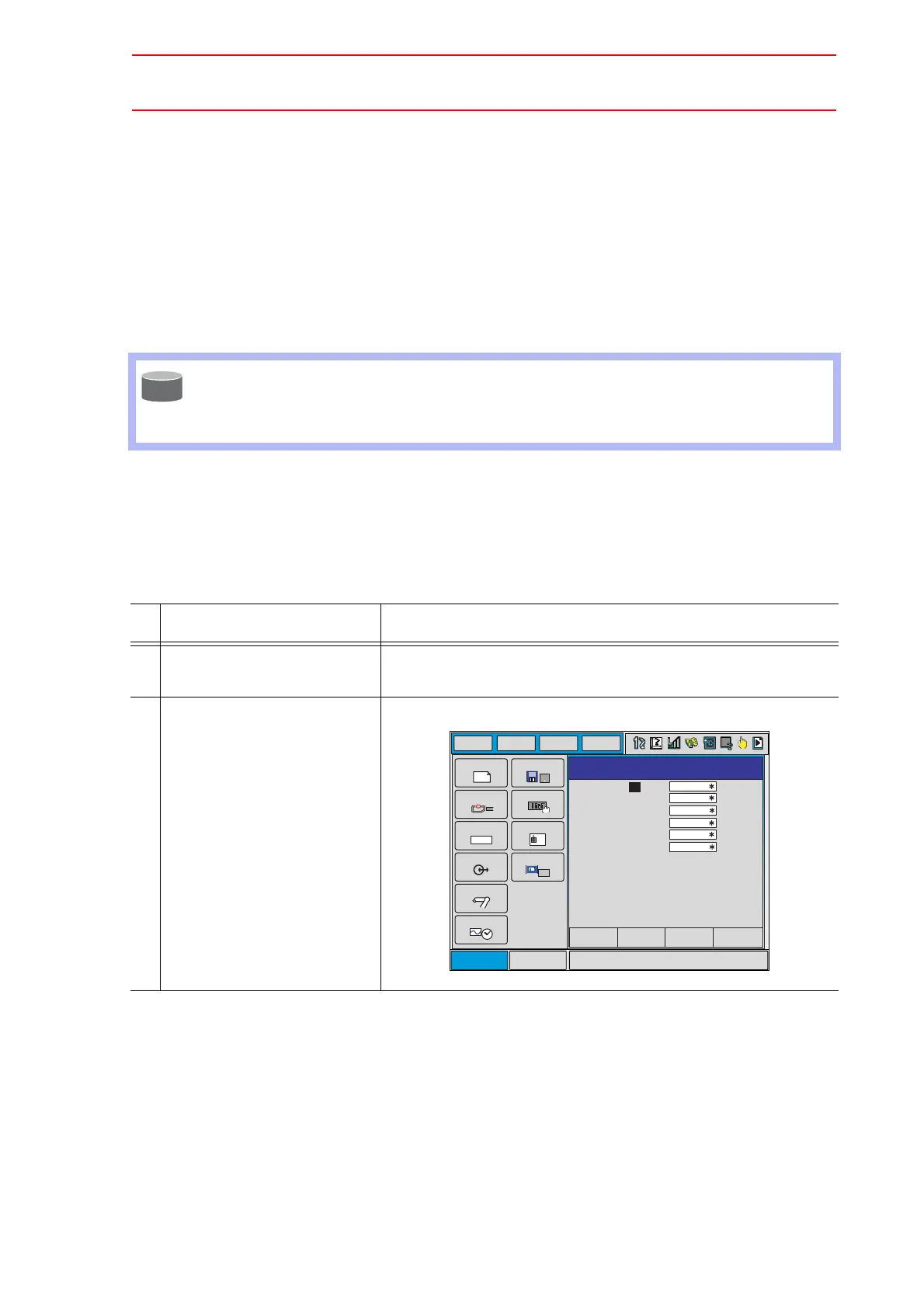
1 Select {ROBOT} under the
main menu.
2 Select {HOME POSITION}. The HOME POSITIONING window appears.
SUPPLE
-MENT
Main Menu
Short Cut
JOB
DOUT
MOVE
END
IN/OUT
In Out
SYSTEM INFO
ARC WELDING
VARIABLE
B001
ROBOT
CF
FD/CF
SETUP
PARAMETER
DISPLAY SETUP
Aa
DATA
EDIT
DISPLAY
UTILITY
T
PAGE
HOME POSITIONING
SELECT
ABSOLUTE DATA
R1:S
L
U
R
B
T
{
{
{
{
{
{

 Loading...
Loading...














