13.3 CPU Unit
13-20
External Emergency Stop
This signal is used to connect the emergency stop switch of an external device. If the signal is
input, the servo power is turned OFF and the job is stopped. While the signal is input, the
servo power cannot be turned ON.
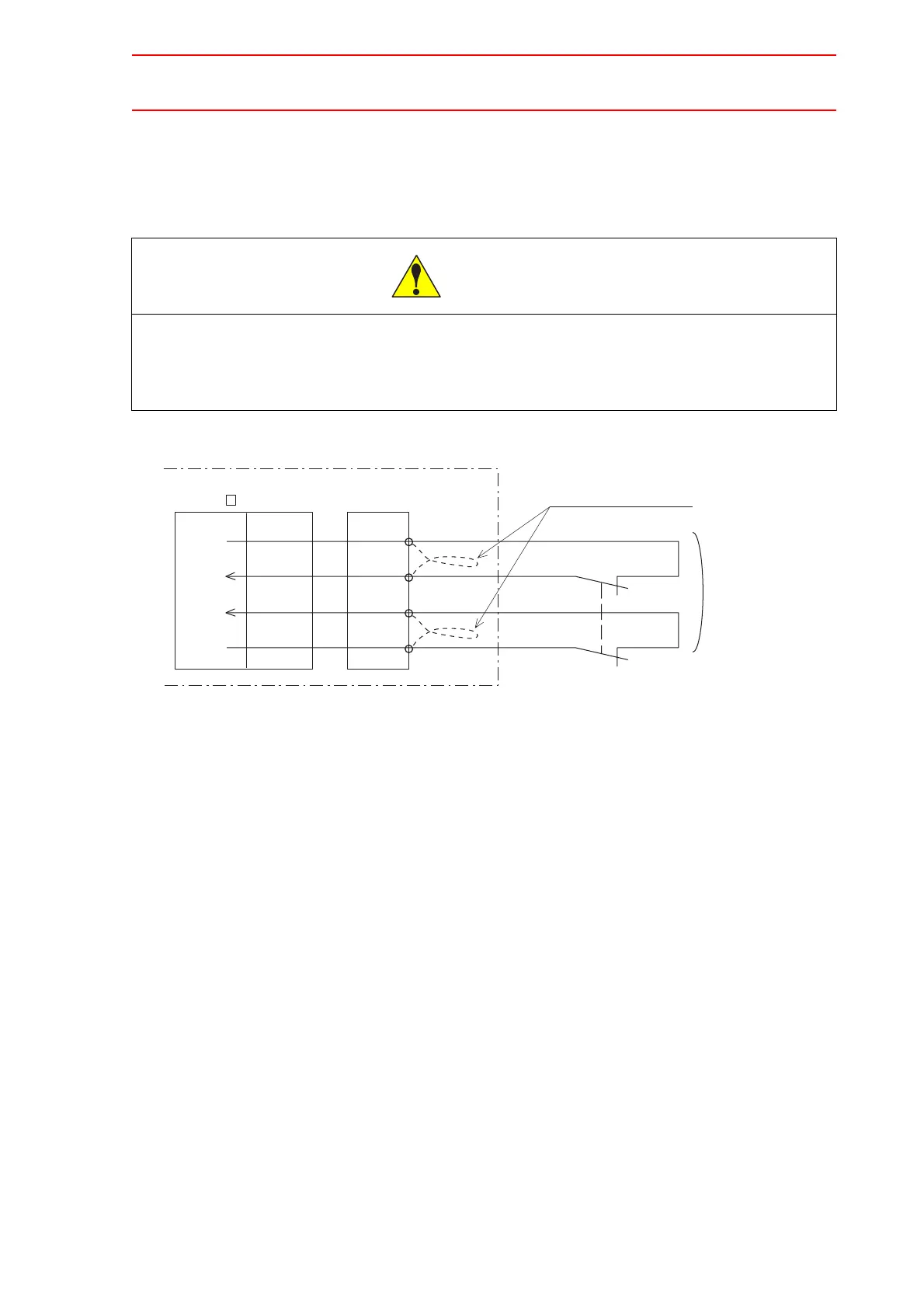
Connection for External Emergency Stop
• Always connect the signals after removing jumper cable.
If the cables are not removed, injury or damage to machinery may result and the external
emergency stop will not work even if the signal is input.
CAUTION
-19
-20
-21
-22
+24V2
EXESP1
EXESP2
024V
External emergency stop
NX100
Turn ON/OFF
at the same time
Remove the jumper cable
Robot system input
terminal block
MXT
JANCD-
NBB01
JANCD-
NIF01-

 Loading...
Loading...














