8.2 Setting the Second Home Position (Check Point)
8-16
3
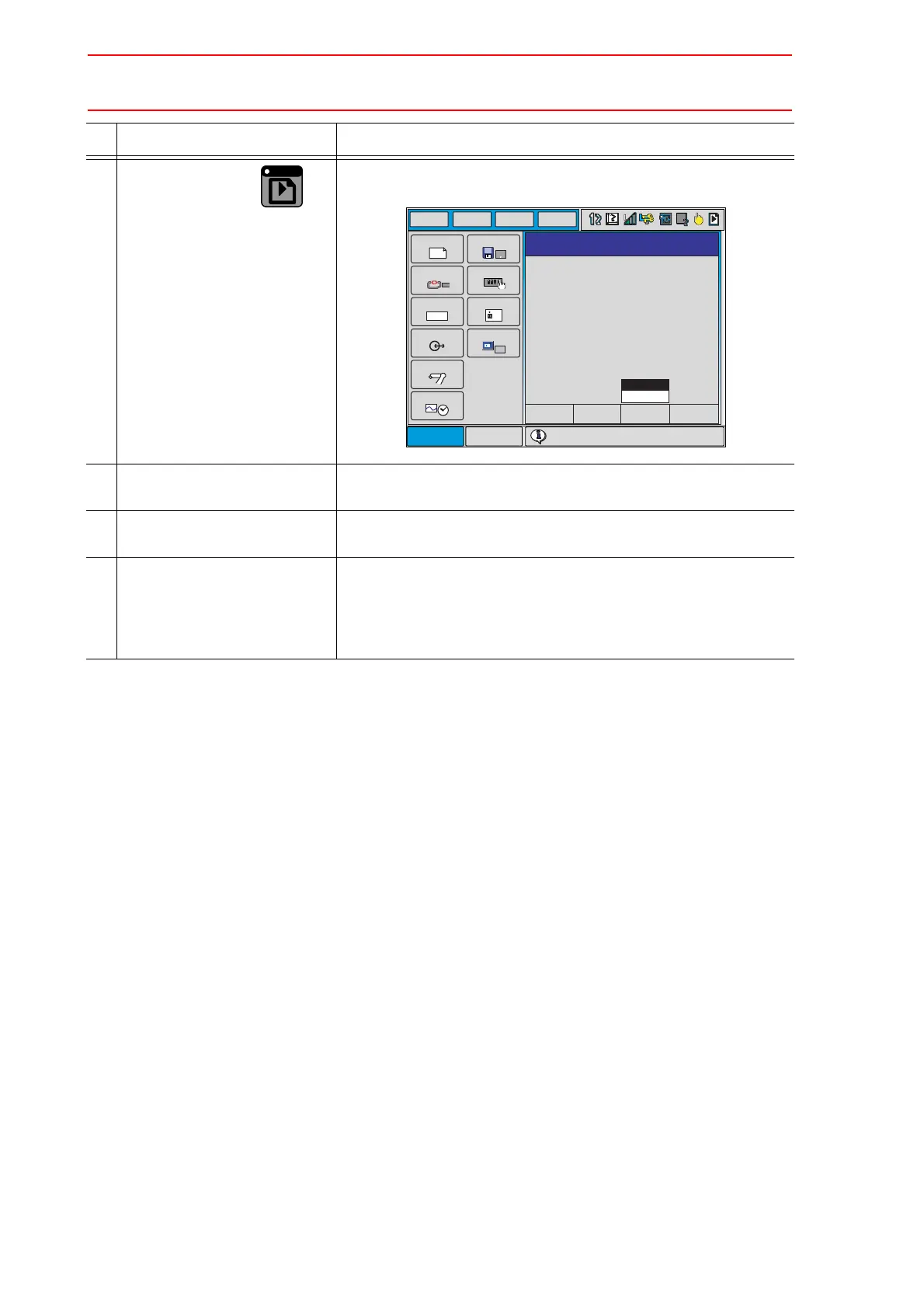
Press the page key ,
or select {PAGE} to display the
selection window for the con-
trol group.
When there are two or more group axes, select the group axes to
which the second home position is to be specified.
4 Press [FWD]. TCP moves to the second home position. The robot moving
speed is set as selected manual speed.
5 Select {DATA} under the
menu.
6 Select {CONFIRM
POSITION}.
A message “Home position checked” appears.
Pulse data of the second home position and current pulse data
are compared. If the compared error is in allowed range, playback
operation can be done.
If the error is beyond the allowed range, the alarm occurs again.
Operation Explanation
PAGE
GO BACK
Main Menu
Short Cut
JOB
DOUT
MOVE
END
IN/OUT
In Out
SYSTEM INFO
ARC WELDING
VARIABLE
B001
ROBOT
CF
FD/CF
SETUP
PARAMETER
DISPLAY SETUP
Aa
DATA
EDIT
DISPLAY
UTILITY
T
PAGE
R1:S
L
U
R
B
T
000
000
000
000
000
000
SECOND HOME POS
SPECIFIED
CURRENT
DIFFERENCE
S1:STATION1
R1:ROBOT
Available to move to and modify specified point

 Loading...
Loading...














