9.12 Feedback Connection (X10, X9, X7)
Every closed servo system normally requires at least one feedback device for sending actual
values from the motor to the drive. Depending on the type of feedback device used, inform-
ation will be fed back to the drive using digital or analog means.
AKD supports the most common types of feedback device.Feedback functions are assigned
with parameters in WorkBench, the setup software. Scaling and other settings are also per-
formed in WorkBench. For a detailed description of the parameters, please refer to the
WorkBench online help.
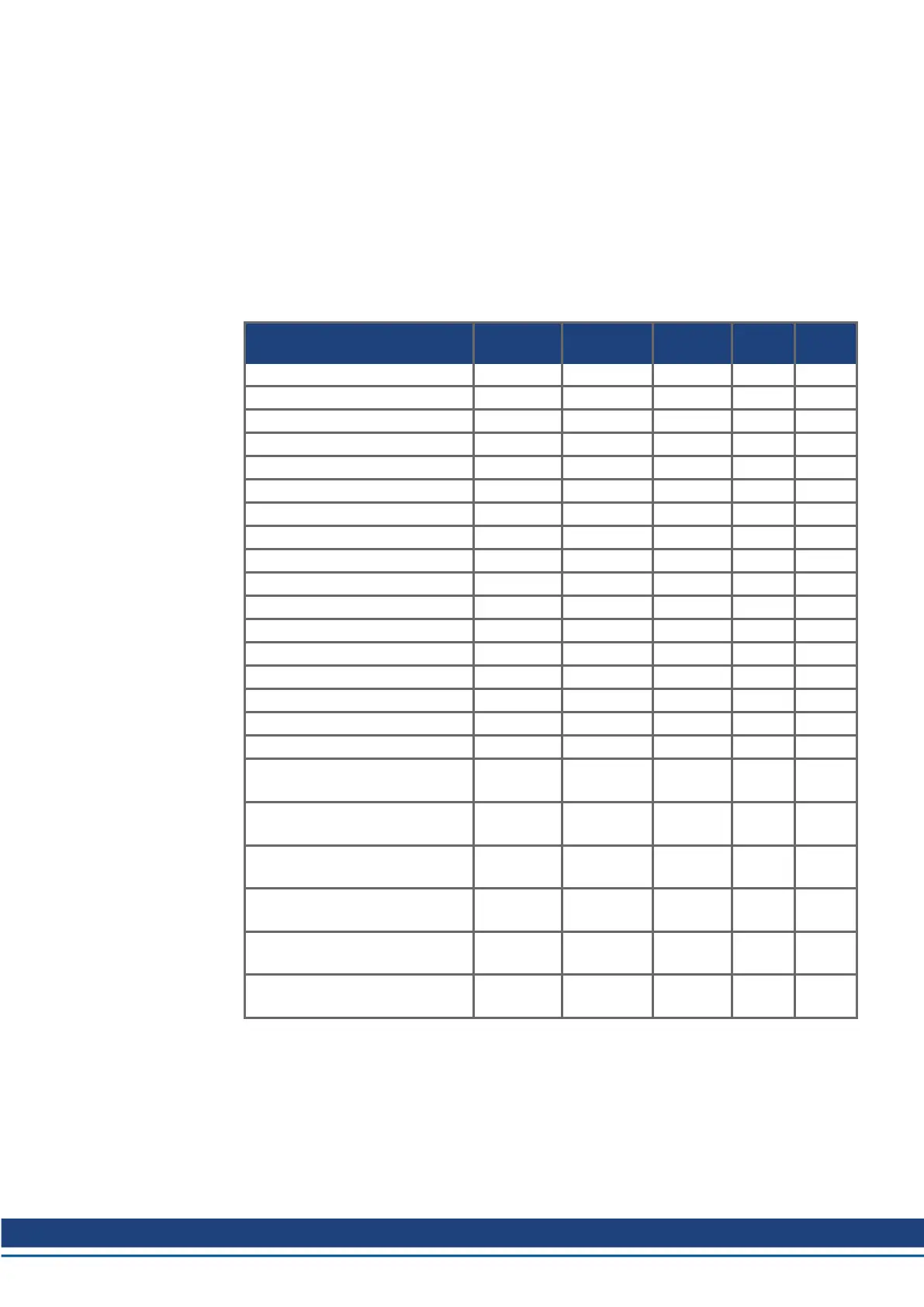
The table below provides an overview of the supported feedback types, their corresponding
parameters, and a reference to the relevant connection diagram in each case.
Feedback Types Wiring Connector FB1.
SELECT
FB2.
MODE
FB3.
MODE
Resolver (➜ # 124) X10 40 - -
SFD (➜ # 125) X10 41 - -
SFD3 (➜ # 126) X10 45 - -
Encoder Hiperface DSL (➜ # 127) X10 46 - -
SinCos Encoder BiSS B (analog) (➜ # 128) X10 32 - -
Encoder BiSS C (digital) (➜ # 129) X10 34 - -
SinCos Encoder ENDAT 2.1 (➜ # 130) X10 30 - -
Encoder ENDAT 2.2 (➜ # 131) X10 31 - -
Encoder ENDAT 2.2 (➜ # 132) X9/X8 - - 0
Encoder ENDAT 2.2 (➜ # 141) X9 - - 0
SinCos Encoder Hiperface (➜ # 133) X10 33 - -
Sine Encoder + Hall (➜ # 134) X10 20 - -
Sine Encoder (➜ # 134) X10 21 - -
Incremental Encoder + Hall (➜ # 135) X10 10 - -
Incremental Encoder (➜ # 135) X10 11 - -
Hall Sensors (➜ # 136) X10 12 - -
Tamagawa Smart Abs (➜ # 137) X10 42 - -
Incremental Encoder,
FB2.SOURCE=1
(➜ # 140) X9 - 0 -
Incremental Encoder,
FB2.SOURCE=2
(➜ # 140) X7 - 0 -
Pulse/Direction,
FB2.SOURCE=1
(➜ # 142) X9 - 1 -
Pulse/Direction,
FB2.SOURCE=2
(➜ # 142) X7 - 1 -
CW/CCW,
FB2.SOURCE=1
(➜ # 143) X9 - 2 -
CW/CCW,
FB2.SOURCE=2
(➜ # 143) X7 - 2 -
AKD Installation | 9 Electrical Installation
Kollmorgen | kdn.kollmorgen.com | October 2017 121
 Loading...
Loading...









