2.3.3. Securing the Robot Arm
120
10
8 FG8
+
+
0.030
0.008
8.5 min.
8 FG8
+
+
0.024
0.006
x 13
8.5 min.
4 x
8.4
170
45°
S
2x 5
±1
Surface on which the robot is fitted
0.05
D
E
F
C
1
2
3
4
B
A
3
2
1
5
C
D
4
6
7
8
A
B
A3
UL class
PROPRIETARY AND CONFIDENTIAL
THE INFORMATION CONTAINED IN THIS
DRAWING IS THE SOLE PROPERTY OF UNIVERSAL
ROBOTS. ANY REPRODUCTION IN PART OR AS A
WHOLE WITHOUT THE WRITTEN PERMISSION OF
UNIVERSAL ROBOTS IS PROHIBITED
REV.
TEL: +45 89 93 89 89 FAX: +45 38 79 89 89 WEB: universal-robots.com
APP.
Engineer:
SIZE
SHEET 1 OF 1
SCALE:1:2
DWG NO.
TITLE:
DATE
NAME
Revision History:
731470
EN AW-6082 T6
1470.15 g
2014-06-16
Flange Base UR10 G5
UNLESS OTHERWISE SPECIFIED:
Dimensions are in millimeters
RoHS compliant (PB free)
Cleaned for chips and oil
NAME
DATE
Drawing
Approved
TOLERANCE
SURFACE FINISH
TREATMENT
MATERIAL
WEIGHT
PROJECTION:
DATE
2014-06-16
+/- 0,1 mm +/- 0,5°
Ra 1,6
Anodized nature 10-20µ
jmi
Status change date:
Replace drawing:
-0,1
+0,3
-0,3
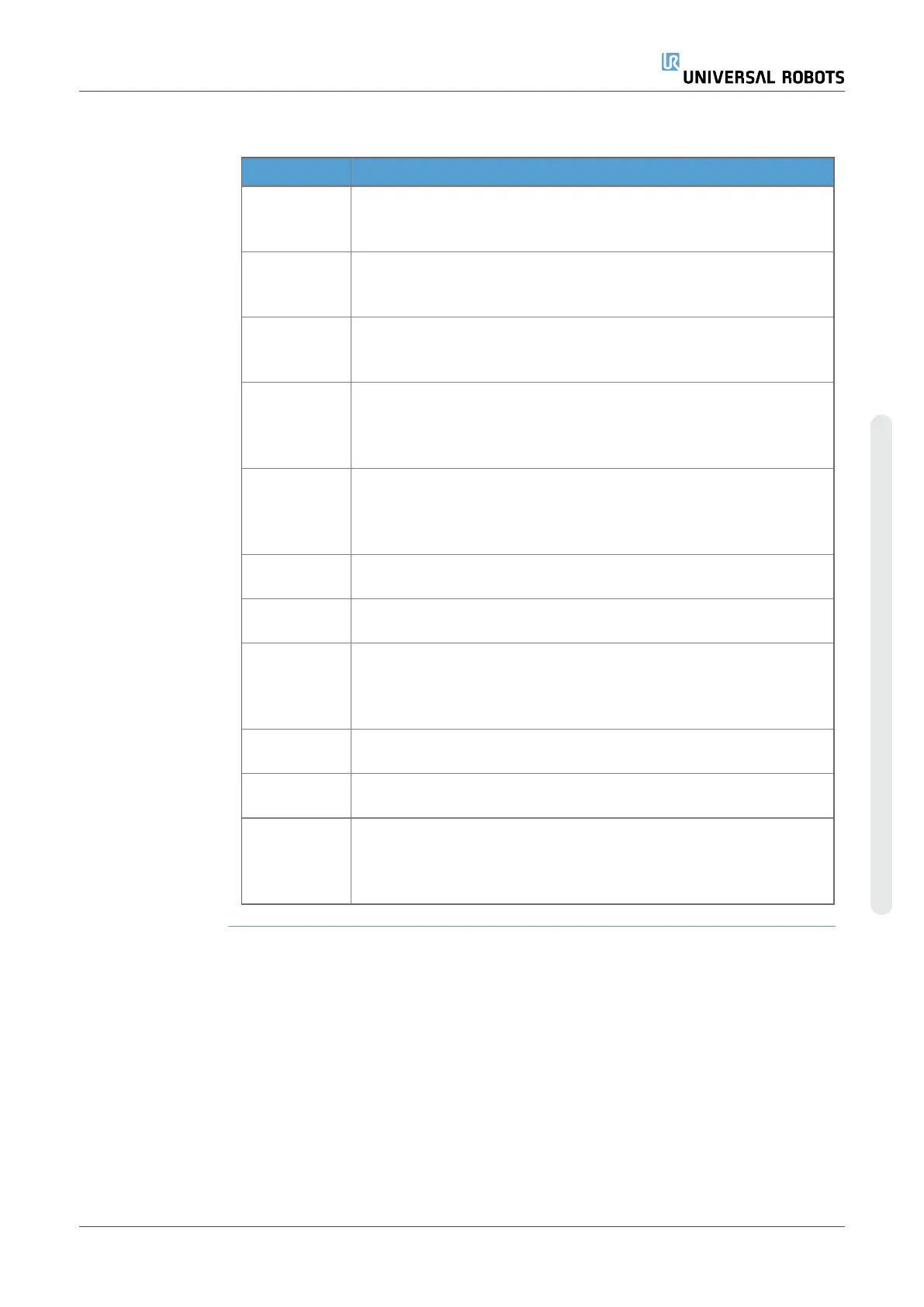
2.2:
Dimensions and hole pattern for mounting the robot.
WARNING
Unexpected start-up and/or movement can lead to injury
•
Power down the robot arm to prevent unexpected start-up during mounting
and dismounting.
To power down the robot arm
1. Press the power button on the Teach Pendant to turn off the robot.
2. Unplug the mains cable / power cord form the wall socket.
3. Allow 30 seconds for the robot to discharge any stored energy.
User Manual 33 UR16e
2.Part I Hardware Installation Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.