Safety
Function
Description PFH
D
Affects
Mode switch
INPUT
When the external connections are Low, Operation Mode
(running/ automatic operation in automatic mode) is in
effect. When High, mode is programming/ teach.
Recommendation: Use with an enabling device, for
example a UR e-Series Teach Pendant with an
integrated 3-position enabling device.
When in teach/program, initially both TCP speed and
elbow speed will be limited to 250mm/s. The speed can
manually be increased by using the pendant user
interface “speed-slider”, but upon activation of the
enabling device, the speed limitation will reset to
250mm/s.
Less
than
1.8E-07
Input to
SF2
Robot
Freedrive
INPUT
Recommendation: Use with 3PE TP and/or 3 Position
Enabling Device INPUT. When Freedrive INPUT is High,
the robot will only enter Freedrive if the following
conditions are satisfied:
•
3PE TP button is not pressed
•
3 Position Enabling Device INPUT either not
configured or not pressed (INPUT Low)
Less
than
1.8E-07
Input to
SF2
Robot
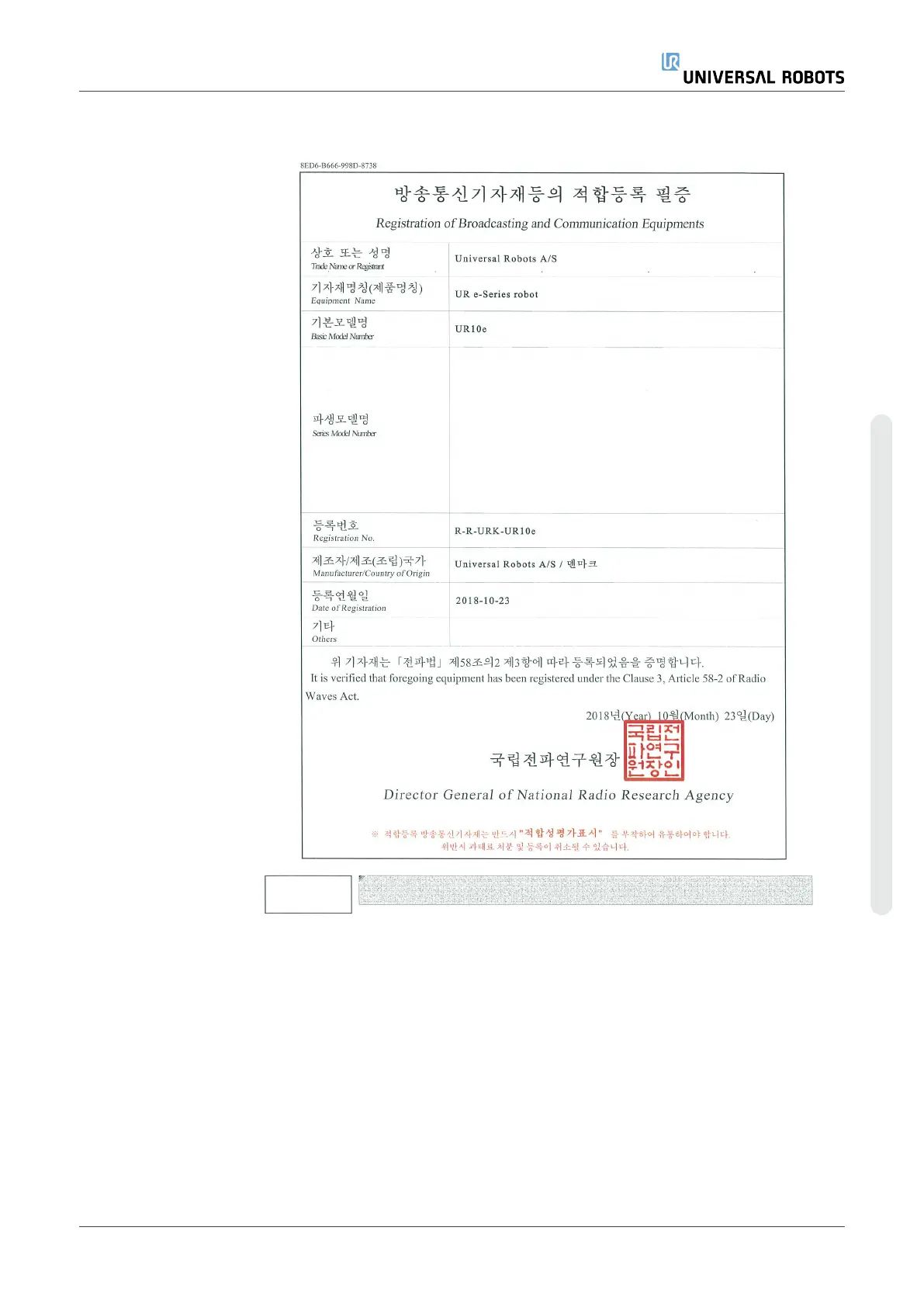
2.15.3. Table 2
UR e-Series robots comply with ISO 10218-1:2011 and the applicable portions of ISO/TS 15066. It
is important to note that most of ISO/TS 15066 is directed towards the integrator and not the robot
manufacturer. ISO 10218-1:2011, clause 5.10 collaborative operation details 4 collaborative
operation techniques as explained below. It is very important to understand that collaborative
operation is of the APPLICATION when in AUTOMATIC mode.
# ISO 10218-1 Technique Explanation UR e-Series
1
Collaborative
Operation 2011
edition, clause
5.10.2
Safety-rated
monitored
stop
Stop condition where position is
held at a standstill and is
monitored as a safety function.
Category 2 stop is permitted to
auto reset. In the case of
resetting and restarting
operation after a safety -rated
monitored stop, see ISO 10218-
2 and ISO/TS 15066 as
resumption shall not cause
hazardous conditions.
UR robots’ safeguard
stop is a safety-rated
monitored stop, See
SF2 on page 1. It is
likely, in the future, that
“safety-rated monitored
stop” will not be called a
form of collaborative
operation.
User Manual 93 UR16e
2.Part I Hardware Installation Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.