4.7 Auto-Tuning
u
Types of Auto-Tuning
The drive offers different types of Auto-Tuning for induction motors and permanent magnet motors. The type of Auto-Tuning
used differs further based on the control mode and other operating conditions. Refer to the tables below to select the type of
Auto-Tuning that bests suits the application. Refer to Start-Up Flowcharts on page 127 for directions on executing Auto-
Tuning.
Note: The drive will only show Auto-Tuning parameters that are valid for the control mode that has been set in A1-02. If the control mode is for
an induction motor, the Auto-Tuning parameters for PM motors will not be available. If the control mode is for a PM motor, the Auto-
Tuning parameters for induction motors will not be available. Inertia Tuning and ASR Gain Tuning parameters and setting options will be
visible only when the drive is set for operation with CLV or CLV/PM.
n
Auto-Tuning for Induction Motors
This feature automatically sets the V/f pattern and motor parameters E1-oo and E2-oo (E3-oo, E4-oo for motor 2) for
an induction motor. Additionally, the feature also sets some F1-oo parameters for speed feedback detection in Closed Loop
Vector.
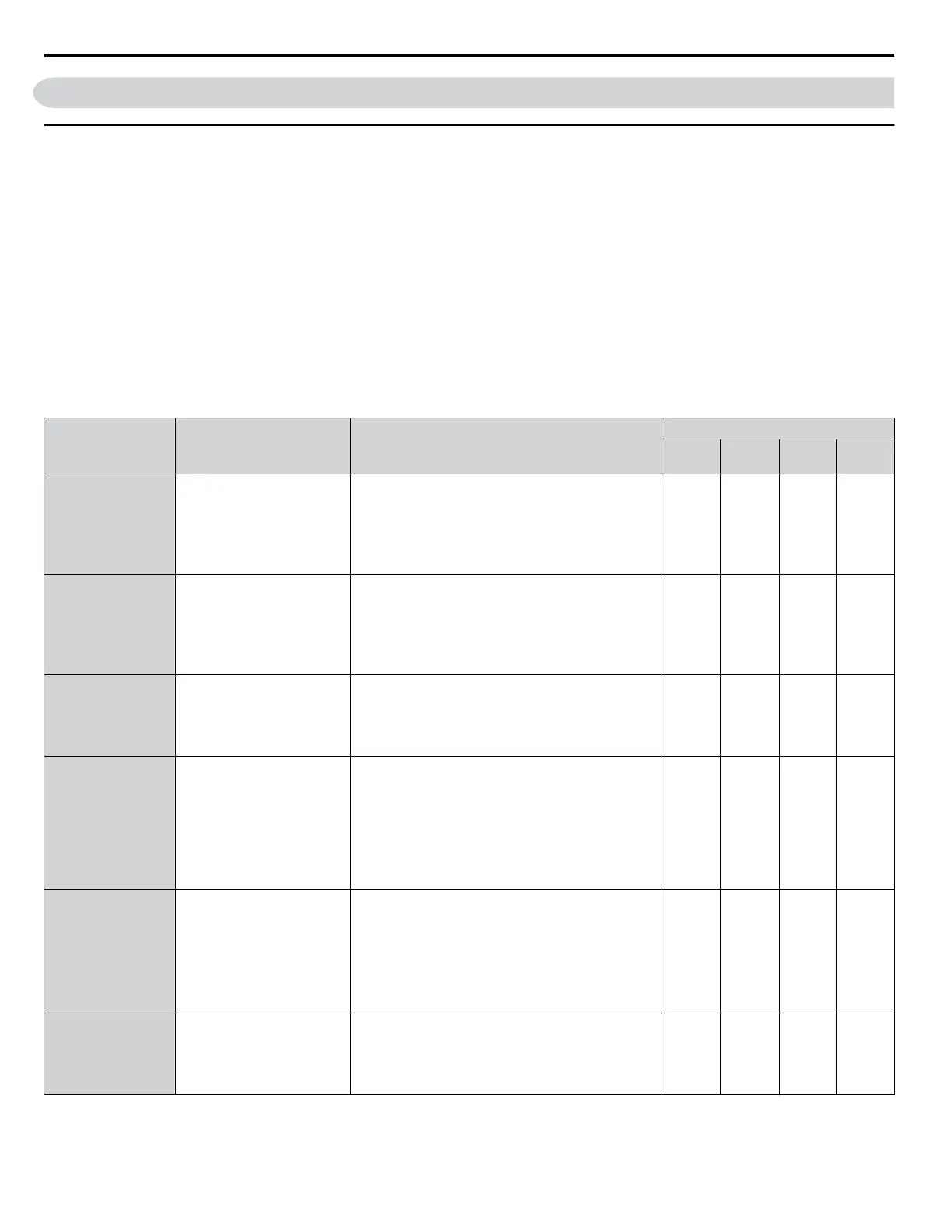
Table 4.28 Types of Auto-Tuning for Induction Motors
Type Setting Application Conditions and Benefits
Control Mode
V/f
V/f w/
PG
OLV CLV
Rotational Auto-
Tuning
T1-01 = 0
• Motor can be decoupled from the load and rotate
freely while Auto-Tuning is performed.
•
Motor and load cannot be decoupled but the motor
load is below 30%.
• Rotational Auto-Tuning gives the most accurate
results, and is recommended if possible.
– – YES YES
Stationary
Auto-Tuning 1
T1-01 = 1
• Motor and load cannot be decoupled and the load is
higher than 30%.
•
A motor test report listing motor data is not
available.
• Automatically calculates motor parameters needed
for vector control.
– – YES YES
Stationary
Auto-Tuning 2
T1-01 = 4
• Motor and load cannot be decoupled and the load is
higher than 30%.
• A
motor test report is available. After entering the no-
load current and the rated slip, the drive calculates
and sets all other motor-related parameters.
– – YES YES
Stationary Auto-
Tuning for Line-to-
Line Resistance
T1-01 = 2
• The drive is used in V/f Control and other Auto-
Tuning selections are not possible.
•
Drive and motor capacities differ.
• Tunes the drive after the cable between the drive and
motor has been replaced with a cable over 50 m long.
Assumes Auto-Tuning has already been performed.
• Should not be used for any vector control modes
unless the motor cable has changed.
YES YES YES YES
Rotational Auto-
Tuning for V/f
Control
T1-01 = 3
• Recommended for applications using Speed
Estimation
Speed Search or using the Energy Saving
function in
V/f Control.
• Assumes motor can rotate while Auto-Tuning is
executed. Increases accuracy for certain functions
like torque compensation, slip compensation, Energy
Saving, and Speed Search.
YES YES – –
Stationary
Auto-Tuning 3
T1-01 = 5
• A
motor test report listing motor data is not available.
• Motor can be driven with a normal duty mode after
Auto-Tuning. A trial run is performed after Auto-
Tuning to automatically calculate motor parameters
needed for vector control.
– – YES YES
Table 4.29 lists the data that must be entered for Auto-Tuning. Make sure this data is available before starting Auto-Tuning.
The necessary information is usually listed on the motor nameplate or in the motor test report provided by the motor
manufacturer. Refer
to Subchart A-1: Simple Motor Setup Using V/f Control on page 129 and Refer to Subchart A-2: High
Performance Operation Using OLV or CLV on page 130 for details on Auto-Tuning processes and selections.
4.7 Auto-Tuning
164
YASKAWA ELECTRIC TOEP C710616 41G YASKAWA AC Drive - A1000 Quick Start Guide

 Loading...
Loading...












