8.9 Overrun / Tool Shock Sensor Releasing
8-75
8.9 Overrun / Tool Shock Sensor Releasing
If the manipulator stops by overrun detection or tool shock sensor detection, release the over-
run or tool shock sensor by the following procedure and reset the alarm and move the manip-
ulator with the axis keys.
• To operate the manipulator with the overrun or shock sensor released,
pay extra attention to the safety of the surrounding operation environ-
ment.
Operation Explanation
1 Select {ROBOT} under the
main menu.
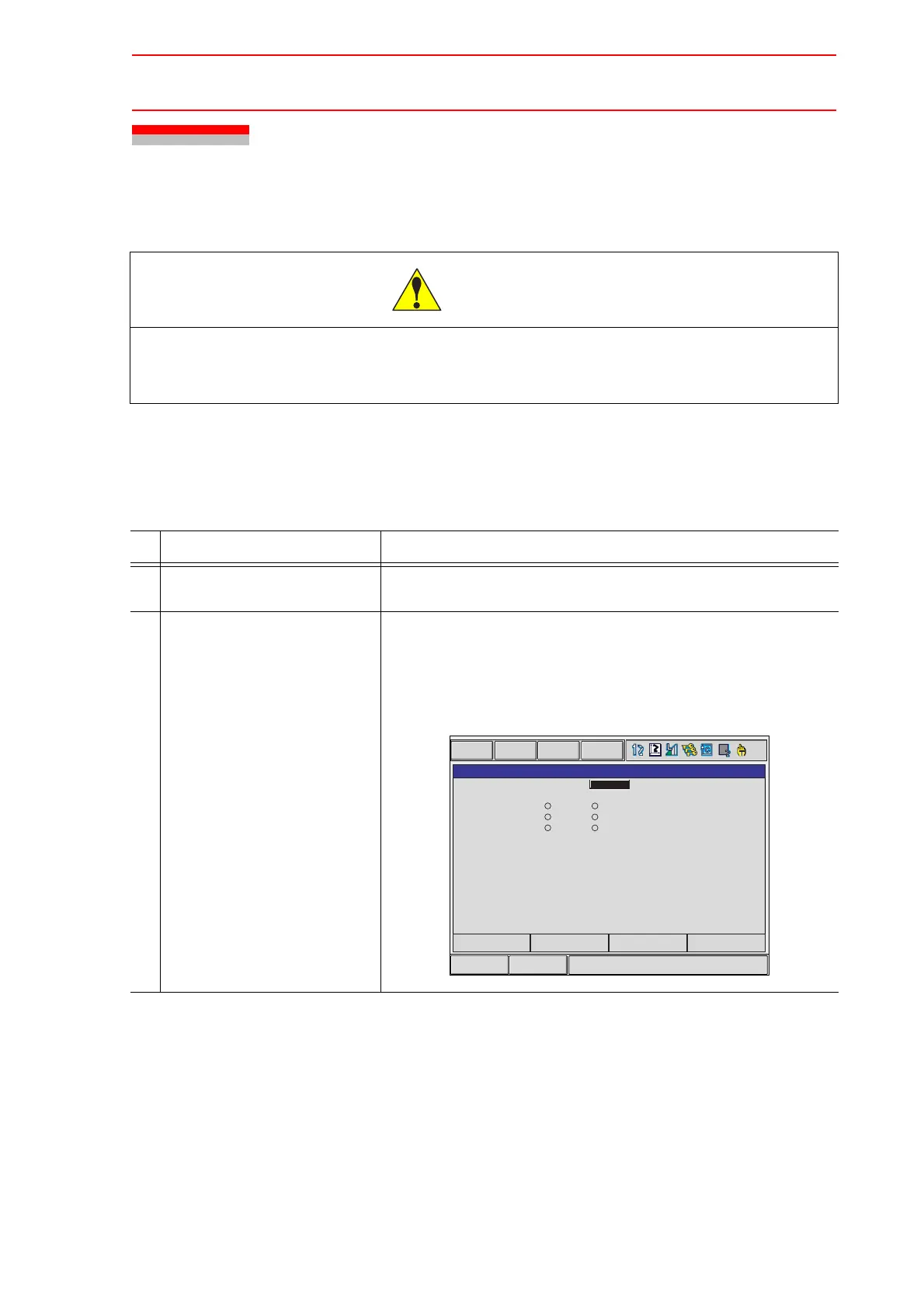
2 Select {OVERRUN & S-SEN-
SOR}.
The OVERRUN & SHOCK SENSOR window appears.
Select either "EMERGENCY STOP" or "HOLD" to set the item
"SHOCK SENSOR STOP COMMAND" which specifies the stop
condition in the current shock sensor detection. “E-STOP” and
“HOLD” are displayed alternately every time [SELECT] is
pressed.
CAUTION
Short CutMain Menu
OVERRUN&SHOCK SENSOR
DATA EDIT DISPLAY UTILITY
E-STOP
SHOCK SENSOR STOP COMMAND
OCCUR GRP
ROBOT1
STATION1
STATION2
OVERRUN S-SENSOR
RELEASE
 Loading...
Loading...















