13.3 CPU Unit
13-30
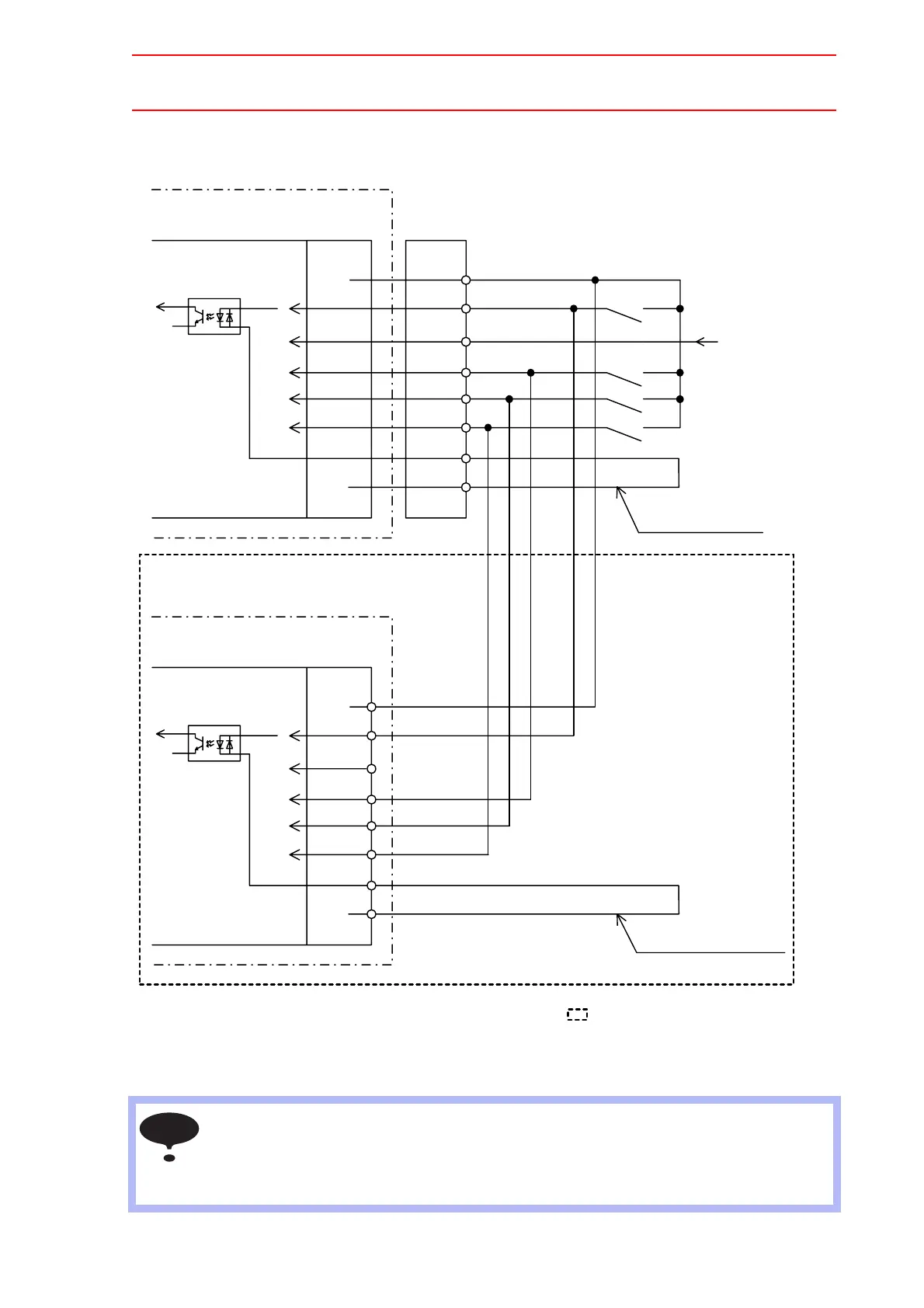
<For the EH80 or UP400RN>
Connection for Direct-in 1 to 5 (Servo) <For the EH80 or UP400RN>
For the EH80 or UP400RN, AXDIN2 (Direct-in (Servo) 2) is already used (for the signal to
indicate a blown fuse in the brake power supply.) Therefore, use the other Direct-ins (1, 3
to 5).
In addition, the jumper cable between MXT-48 and 50 is already connected and should not
be removed.
AXDIN1
AXDIN2
AXDIN3
AXDIN4
AXDIN5
AXINCOM
-49
-43
-44
-45
-46
-47
-48
-50
024V
+24V2
SGDR-
AXA01A-□
JANCD-
NBB01
Robot system input
terminal block
MXT
Direct-in (Servo) 3
Direct-in (Servo) 4
Direct-in (Servo) 5
CPU Unit
JZNC-NRK01
CNM
-49
-43
-44
-45
-46
-47
-48
-50
AXDIN1
AXDIN2
AXDIN3
AXDIN4
AXDIN5
AXINCOM
024V
+24V2
SGDR-
AXA01A-□
JANCD-
NBB02
Servo interface unit for the
coordinated control system
JZNC-NRK02
CNM
-7
-1
-2
-3
-4
-5
-6
-10
The jumper cable is
already connected.
The part of wiring is for Servo
interface unit for the coordinated control
system, JZNC-NRK02.
Connect the jumper cable.
Signal to indicate a
blown fuse in the
brake power supply
Direct-in (Servo) 1
NOTE
 Loading...
Loading...















