8.3 Tool Data Setting
8-23
There are 24 tool files numbered 0 to 23. In a basic system with one manipulator and one
tool, the tool file for tool No.0 is used. If there is more than one tool, for example when
using a multihand, use the tool numbers in the order 0, 1, 2, .... etc.
Tool pose data is not registered in tool calibration. For details on how to register pose data,
refer to "Registering Tool Angle" of "8.3.1 Registering Tool Files".
Operation Explanation
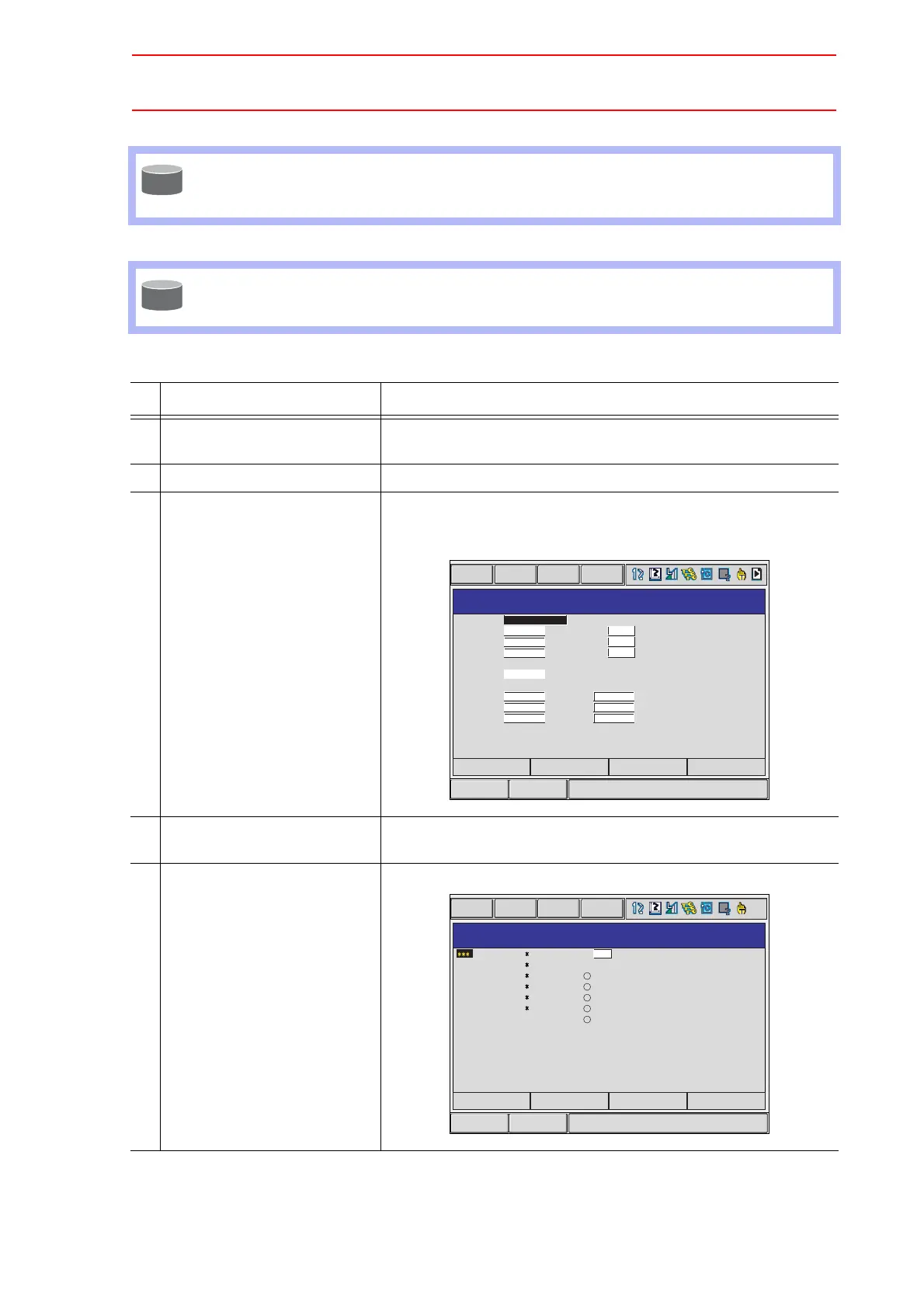
1 Select {ROBOT} under the
main menu.
2 Select {TOOL}.
3 Select the desired tool num-
ber.
In the same way shown in Explanation 2, 3 in "Registering Coor-
dinate Data" of "8.3.1 Registering Tool Files" the desired coordi-
nate window is shown.
4 Select {UTILITY} under the
menu.
5 Select {CALIBRATION}. The TOOL CALIBRATION window is shown.
SUPPLE
-MENT
SUPPLE
-MENT
Short CutMain Menu
TOOL
DATA EDIT DISPLAY UTILITY
TOOL NO. : 0 / 24
NAME
X
Y
Z
W
Xg
Yg
Zg
0.000
0.000
260.000
0.000
0.000
0.000
0.000
mm
mm
mm
kg
mm
mm
mm
Rx
Ry
Rz
Ix
Iy
Iz
0.00
0.00
0.00
0.000
0.000
0.000
deg.
deg.
deg.
kg.m2
kg.m2
kg.m2
RB1 STD TOOL
_
_
PAGE
Short CutMain Menu
TOOL CALIBRATION
DATA EDIT DISPLAY UTILITY
TOOL NO. : 00
:
:
:
:
:
POSITION TC1
<STATUS>
TC1
TC2
TC3
TC4
TC5
:
S
L
U
R
B
T
CANCELCOMPLETE

 Loading...
Loading...














