2.3.3 Orienting and securing the robot
Introduction
This section details how to orient and secure the robot to the working bench in
order to run the robot safely. The requirements made on the workbench are shown
in sections:
• Requirements, foundation on page 62
• Loads on foundation, robot on page 61
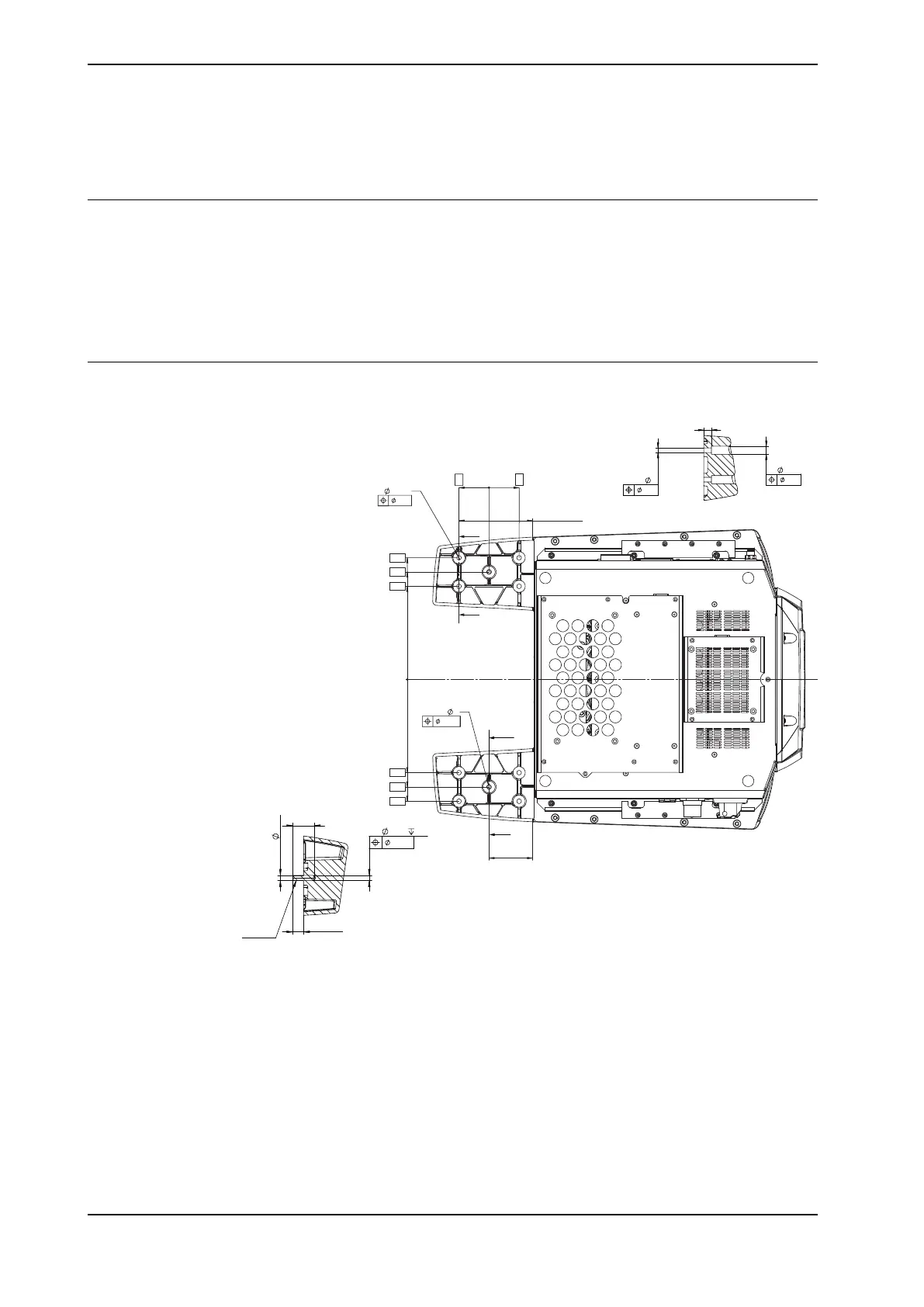
Hole configuration, base
There are eight holes on the bottom of the robot body.
0
0
40
4
0
162
143
162
124
143
124
0.3
0.06
58 1
0
6Thru 8x
1
-
98 -
0
2x 6
6 m6
2x
6 H8
12
24
12 ±2
(A) (2x)
0.06
C
C
C - C
B
B
10
8x
10.5
8x
6
0.3
0.3
B - B
xx1400002124
Continues on next page
74 Product manual - IRB 14000
3HAC052983-001 Revision: D
© Copyright 2015 - 2016 ABB. All rights reserved.
2 Installation and commissioning
2.3.3 Orienting and securing the robot