ComNav Commander P2 & P2VS Installation & Operation Basic Operations
Document PN 29010074 V4.1 - 134 -
XTE – Steering Quickly Back to a Track
Cross-Track Error is the perpendicular distance from the desired Track to the boat’s position.
When using Cross-Track Error Steering (Correction set to “XTE”), the autopilot initially steers
on the Heading that was current when you enter
NAV
mode, and also monitors the
Cross-Track Error reported by the Navigation System.
If there is any Cross-Track Error, the autopilot changes the Commanded Heading so as to
minimize the Cross-Track Error as rapidly as possible – so that the boat returns to the
desired Track as quickly as possible.
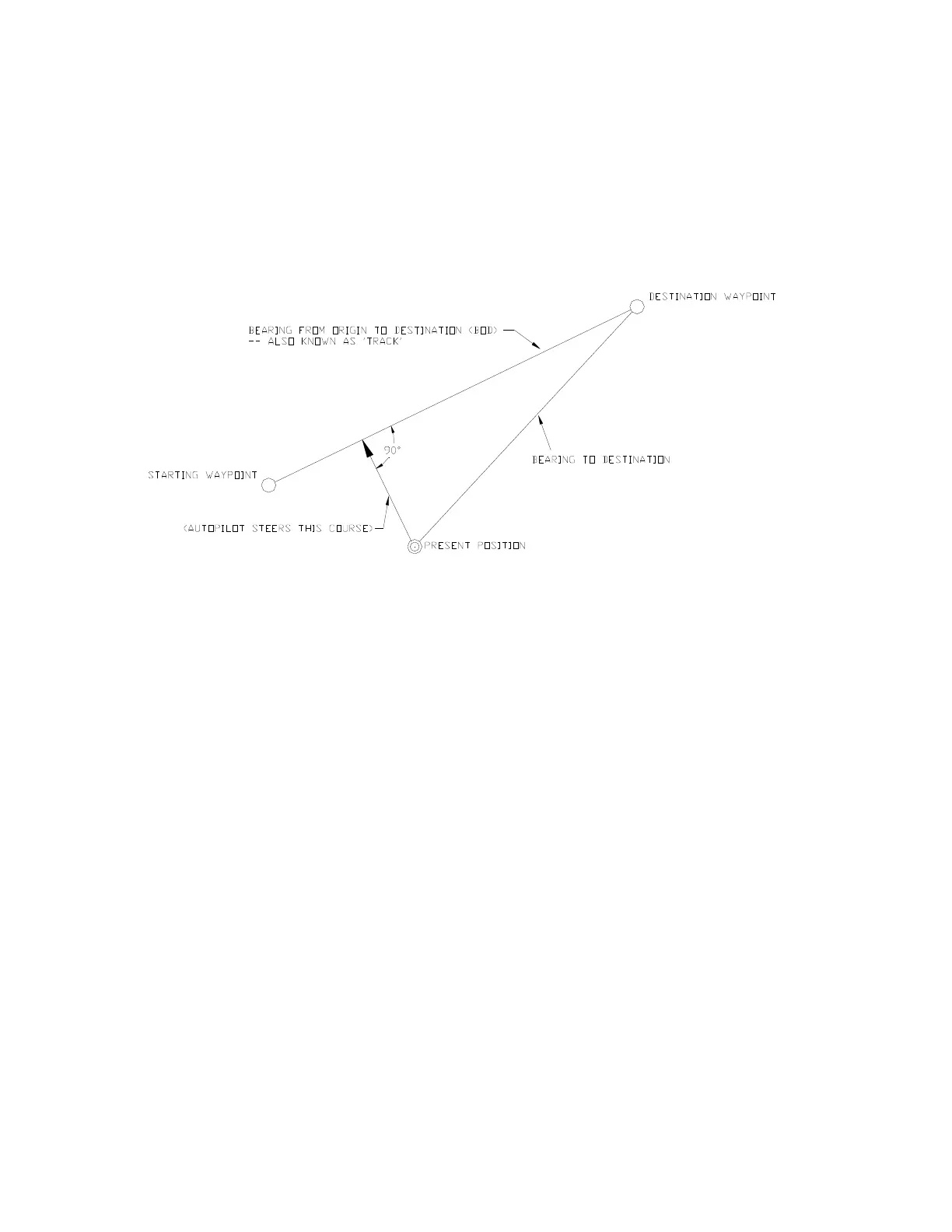
Figure 87 – Steering with Correction set to XTE
To see how this method works, try it out by performing the following steps:
1) Change “Correction” in the Nav menu to “XTE”, and “MAX Correction” to 90°.
2) Make sure the Navigation System is turned on, that a route consisting of at least a
starting position (origin) and a destination point is entered, and that the Navigation
System is set to output sentences which contain BOD data.
3) Activate the route.
4) Switch the autopilot to
STANDBY
mode and manually steer the boat onto the Track.
5) Place the autopilot into
NAV
mode.
6) Observe the boat’s Heading and the Cross-Track Error. The autopilot should be steering
so as to minimize any Cross-Track Error that develops (from wind, waves, cross-currents,
etc.), as rapidly as possible.
7) Switch the autopilot to
STANDBY
mode and manually steer the boat to a position well off
the desired Track.
8) Place the autopilot back into
NAV
mode.
9) Observe the boat’s Commanded & actual Heading and the Cross-Track Error. The
Commanded Heading should shift to something approximately 90° different than the
desired Track (less than the Track if you are to Starboard of it, greater if you are to Port).
The autopilot should keep steering that Heading until the boat nears the Track, thus
minimizing Cross-Track Error as rapidly as possible, and then turn the boat onto the
Track.
Caution!
Be sure to maintain a sharp lookout to ensure that there are no obstacles
between the boat’s current position & the desired Track, with “XTE” Correction.