Item
Description
If a state does not exist, an appropriate error strategy can be
set.
• No Check: The program is continued without checking
whether the switching state exists.
• Strategy 1…3: Configured error strategies
12.1.2 Gripper SYN SET inline form
The inline form can be used to set a switching state for the gripper at the
start or end point of the motion. The switching state can be delayed or
brought forward and/or shifted in space.
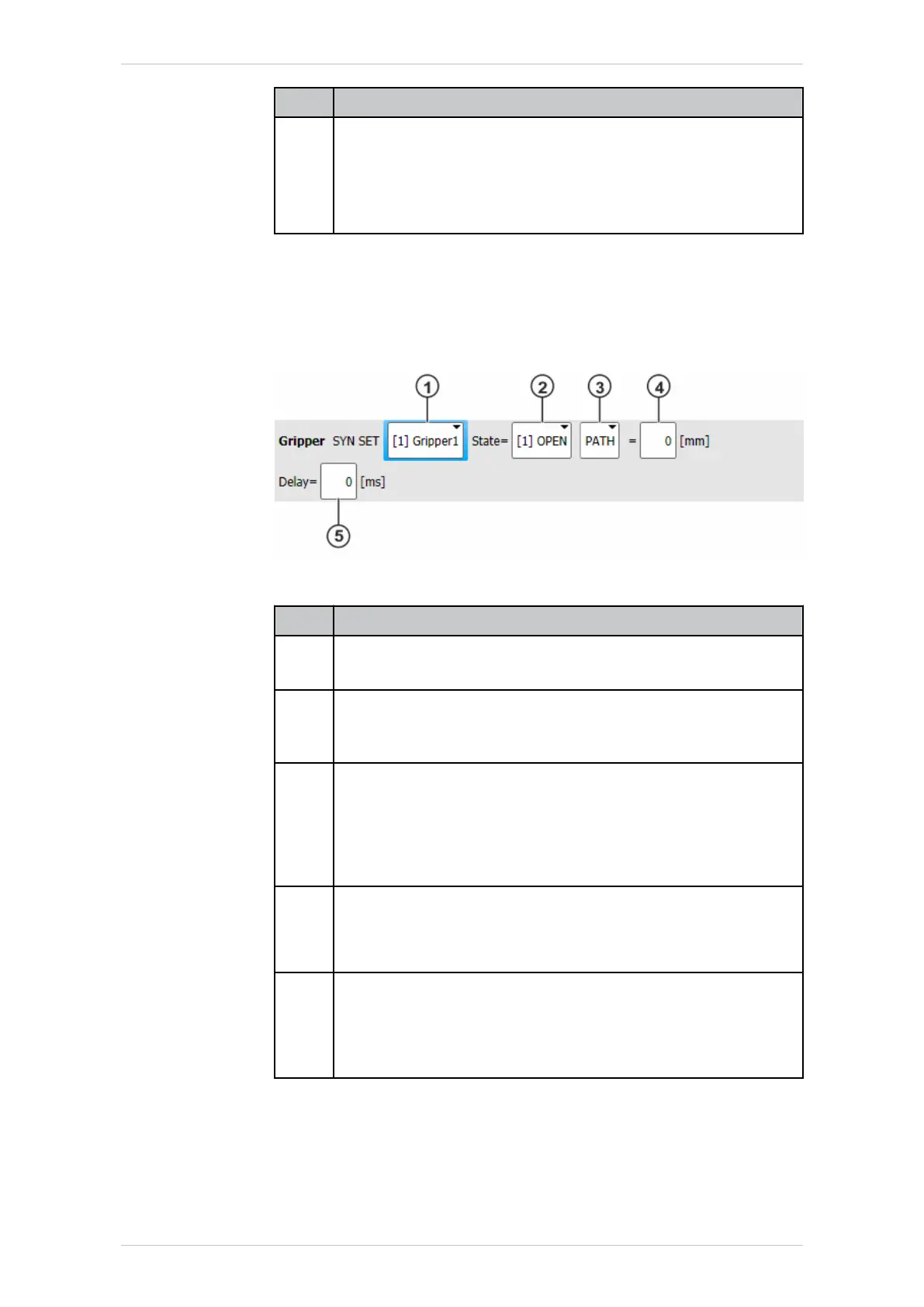
Fig. 12-2: Gripper SYN SET inline form
Item
Description
1 Active grippers
Only active grippers are displayed.
2 Switching state of the gripper that is set
The number and the designation of switching states that can
be selected depends on the configuration.
3 Point to which Gripper SYN SET refers:
• START: Start point of the motion
• END: End point of the motion
• PATH: The setting of the switching state refers to the end
point of the motion. An offset in space is also possible.
4 This box is only displayed if PATH is selected.
Distance from the switching point to the end point
• -2,000 … +2,000 mm
5 Switching action delay
• -1000 … 1000 ms
The time specification is absolute. The switching point varies
according to the velocity of the robot.
12.1.3 Gripper CHECK inline form
The switching state of the gripper is checked via the inline form.
ready2_educate
112/154 | www.kuka.com BA ready2_educate V8 | Issued: 05.09.2018
Programming