Item
Description
3 X1
Power supply, 24V, PE connections
4 X1B
Connections for gripper pressure valve, E-STOP, acknowledg-
ing operator safety, safety switches, Profinet
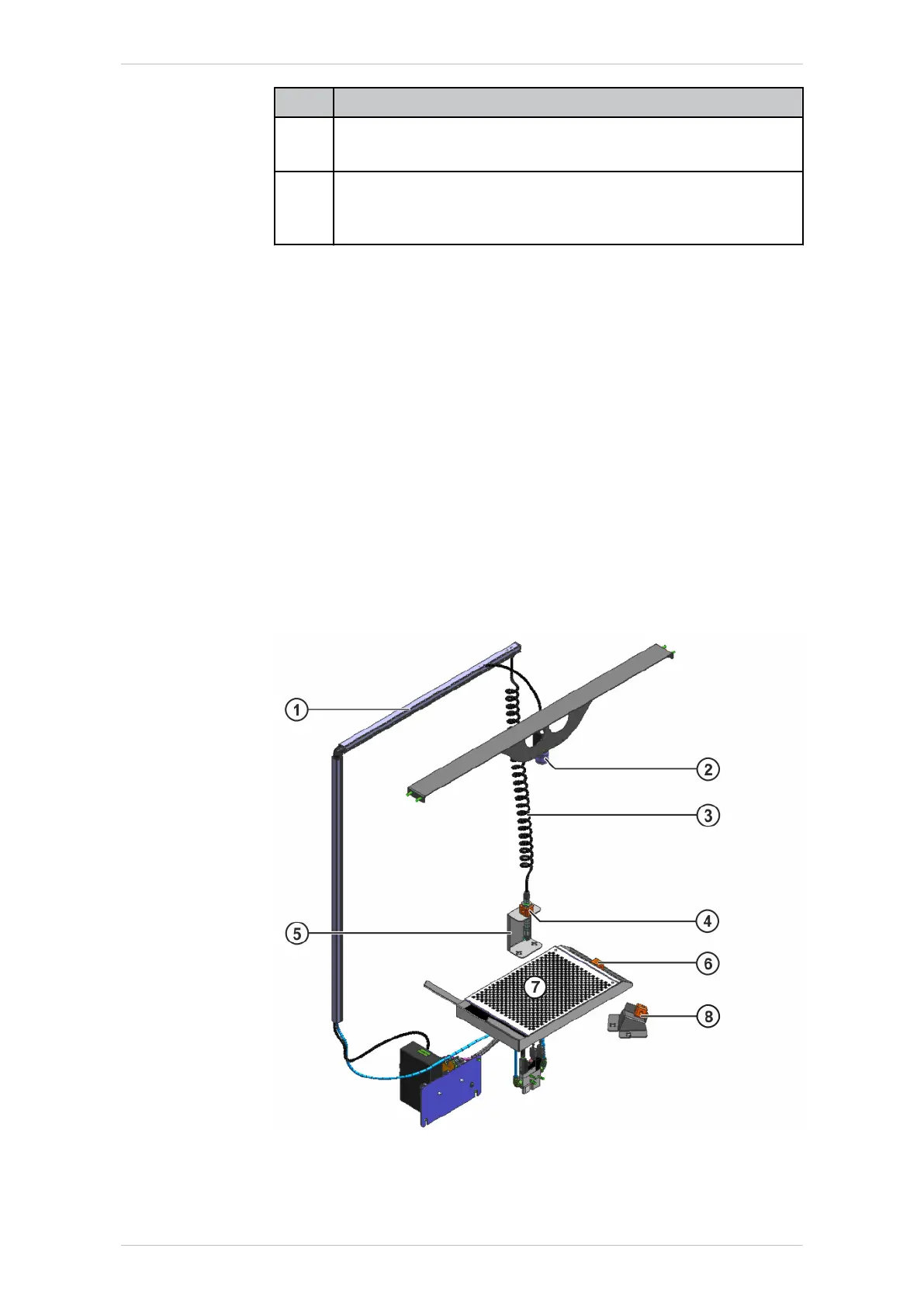
3.5.7 Vision
Description
The position of a cube on the application plate is determined using the
camera. The cube is picked up and repositioned using the vacuum cup.
Sequence example
The robot takes a cube from the magazine with the gripper and drops the
cube onto the chute. The cube rolls down the chute and stops at a ran-
dom location. The camera detects the position of the cube. The robot
grasps the vacuum cup, picks up the cube and places it on the edge of
the chute. The vacuum cup is set down and the robot grasps the ruler.
Using the ruler, the cube located at the edge of the chute can be tossed
onto the mat. Another possibility is to set the cube down in a centering
station and then take it to the magazine using the gripper.
Overview
Fig. 3-34: Vision
ready2_educate
34/154 | www.kuka.com BA ready2_educate V8 | Issued: 05.09.2018
Product description