Gocator Line Profile Sensors: User Manual
Protocols • 446
For information on job file structures (for example, if you wish to create job files programmatically), see
Job File Structure on page 356.
Data Types
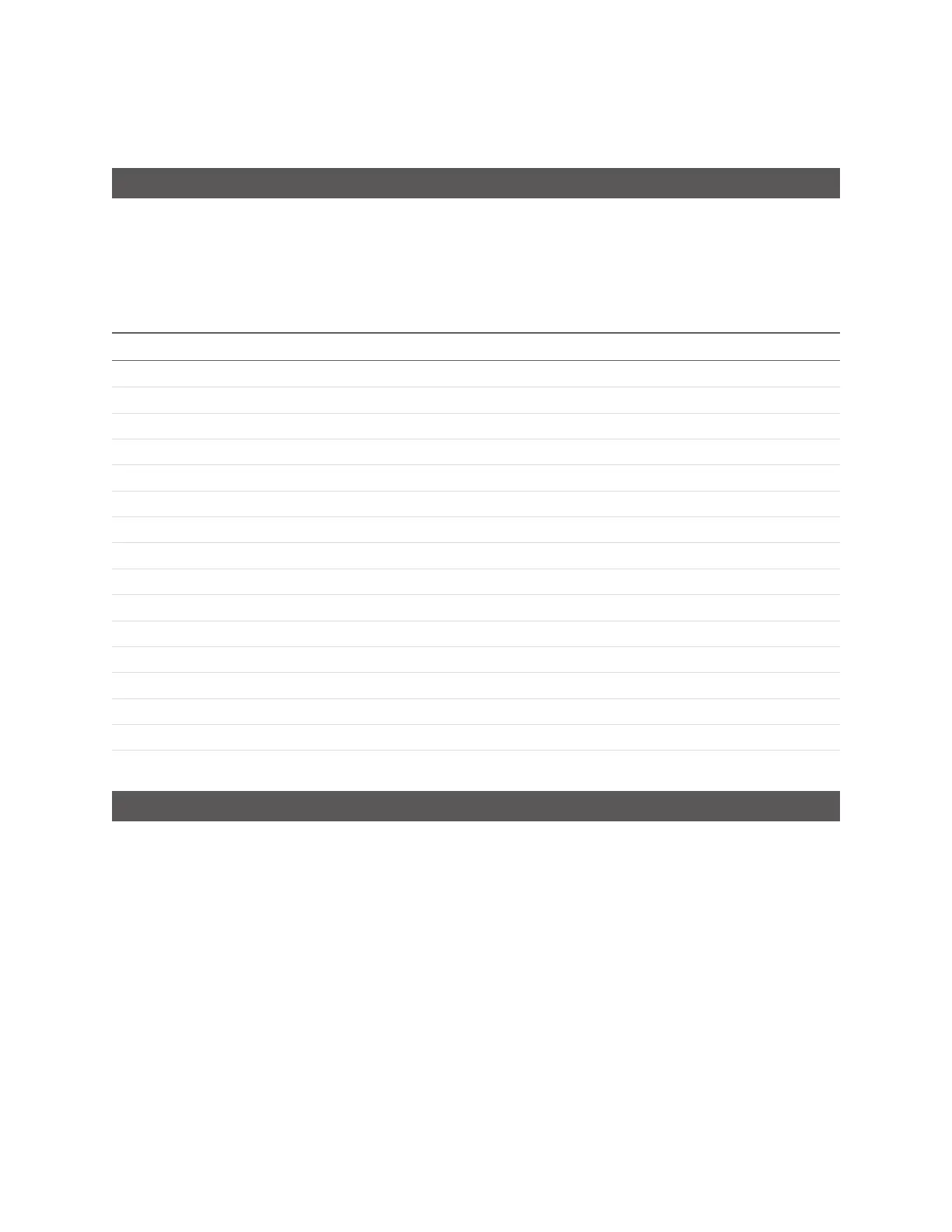
The table below defines the data types and associated type identifiers used in this section.
All values except for IPaddresses are transmitted in little endian format (least significant byte first)
unless stated otherwise. The bytes in an IP address "a.b.c.d" will always be transmitted in the order a, b,
c, d (big endian).
Type Description Null Value
char Character (8-bit, ASCII encoding) -
byte Byte. -
8s 8-bit signed integer. -128
8u 8-bit unsigned integer. 255U
16s 16-bit signed integer. -32768 (0x8000)
16u 16-bit unsigned integer. 65535 (0xFFFF)
32s 32-bit signed integer. -2147483648 (0x80000000)
32u 32-bit unsigned integer. 4294967295 (0xFFFFFFFF)
64s 64-bit signed integer. -9223372036854775808 (0x8000000000000000)
64u 64-bit unsigned integer. 18446744073709551615 (0xFFFFFFFFFFFFFFFF)
64f 64-bit floating point -1.7976931348623157e+308
Point16s Two 16-bit signed integers -
Point64f Two 64-bit floating point values -
Point3d64f Three 64-bit floating point values -
Rect64f Four 64-bit floating point values -
Rect3d64f Eight 64-bit floating point values -
Data Types
Commands
The following sections describe the commands available on the Discovery (page 447), Control (page
450), and Upgrade (page 486) channels.
When a client sends a command over the Control or Upgrade channel, the sensor sends a reply whose
identifier is the same as the command's identifier. The identifiers are listed in the tables of each of the
commands.
Status Codes
Each reply on the Discovery, Control, and Upgrade channels contains a status field containing a status
code indicating the result of the command. The following status codes are defined: