Gocator Line Profile Sensors: User Manual
How Gocator Works • 58
When applying the transformations, the object is first rotated around X, then Y, and then Z, and then the
offsets are applied.
The adjustments resulting from alignment are called transformations and are displayed in Sensor panel
on the Scan page. For more information on transformations in the web interface, see Transformations
on page 115.
For more information on aligning sensors, see Alignment on page 125.
Part and Section Coordinates
When you work with parts or sections extracted from scan data, a different coordinate system is
available.
Part data can be expressed in aligned system coordinates or unaligned sensor coordinates, depending
on the alignment state of the sensor. Part data can also be represented in part coordinates: data and
measurement results are in a coordinate system that places the X and Yorigins at the center of the part.
The Z origin is at the surface surrounding the alignment target.
The Frame of Reference setting, in the Part Detection panel on the Scan page, controls
whether part data is recorded using sensor/system coordinates or part coordinates.
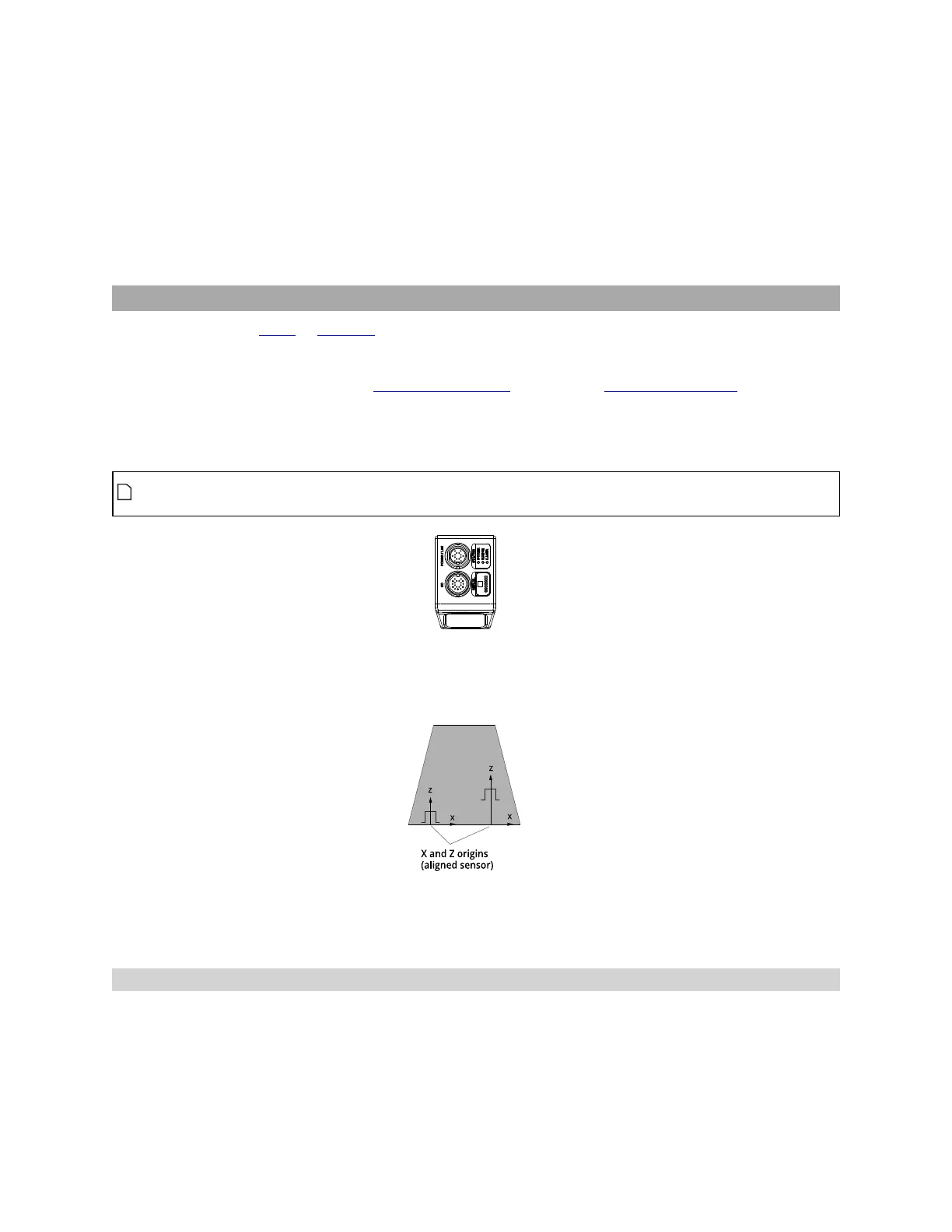
Sections are always represented in a coordinate system similar to part coordinates: the X origin is always
at the center of the extracted profile, and the Z origin is at the bottom of the alignment target (or in the
center of the measurement range if the sensor is unaligned).
Switching between Coordinate Systems
In many situations, when working with part data that has been recorded with Frame of Reference set
to Part or section data, it is useful to have access to the "real-world"coordinates, rather than part- or
section-relative coordinates. Gocator provides special "global"measurements, in the Bounding Box
tools, that you can use in Gocator scripts to convert from part or section coordinates to sensor/system
coordinates.