XtraDrive User Manual Chapter 6: Servo Adjustment
6-3
6.2. Analog Input or Contact Input Velocity Control
This section provides technical information for operation of servomotors in
Velocity Control mode with Analog Input.
The Identical Control principle is applied in case of Contact Input or Analog
Input. In case of Contact Input, the velocity command value is retrieved from
one of the predefined values, according to the Contact Input setting.
Instructions and descriptions referring to Analog Input in the following
sections also apply to Contact Input.
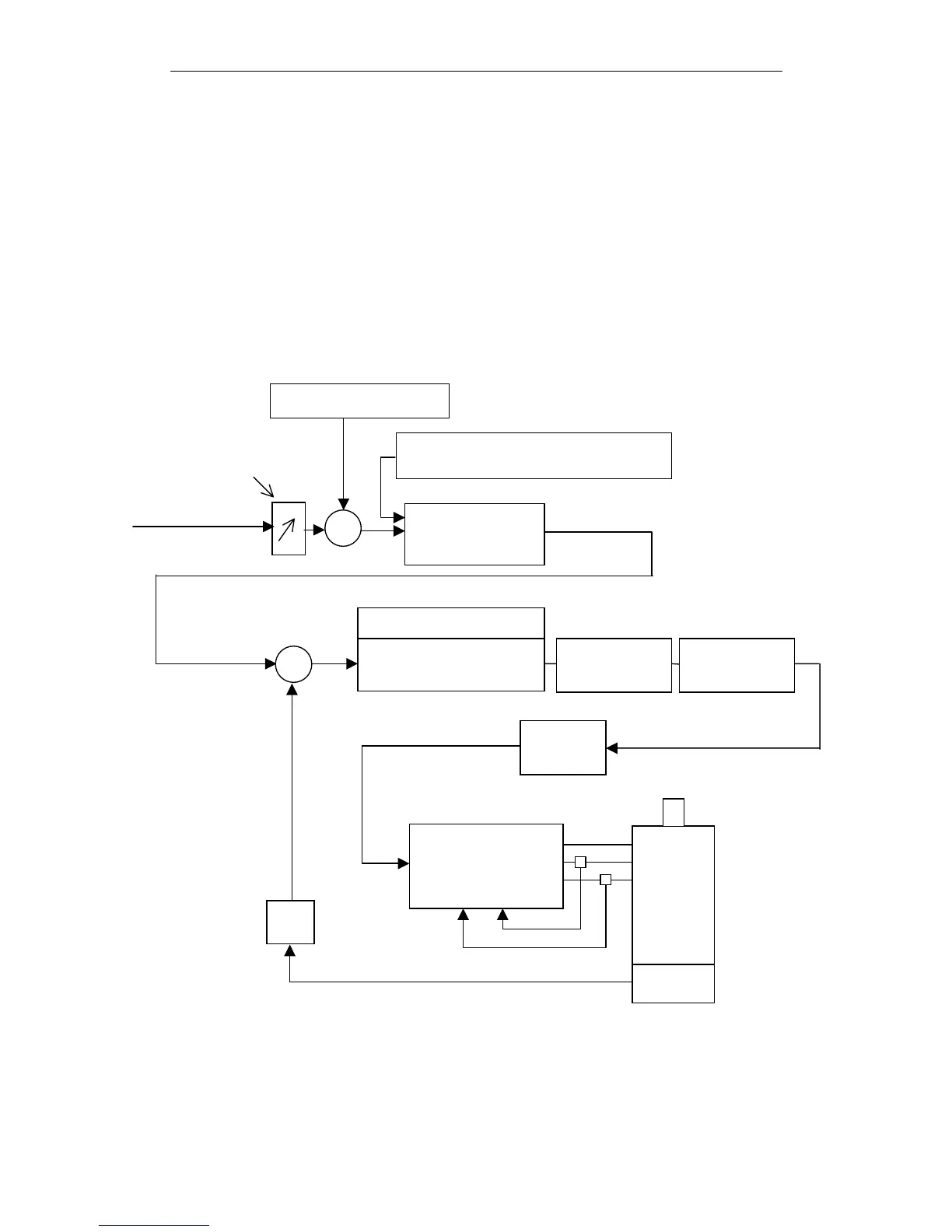
6.2.1. Principle and Block Diagram of the Velocity Control
The Velocity Command is first processed in order to smooth the
operation. The resulting Internal Speed Command is then compared
with the actual speed of the motor. The difference is then amplified and
filtered to produce a Torque and Current command for the Current
Controller.
Command
Smoothing
Analog Input
Speed Command
+
+
Offset Compensation
Input Gain
K
v
(1+ 1/T
i
S)
Notch Filter
Low Pass
Filter
Internal Speed
Command
1/K
t
Torque
Command
Current Controller
Motor
Encoder
Current
Command
S
+
-
S