Description Of Specific Functions
V560 Series High Performance Closed-Loop Vector Inverter User Manual
169
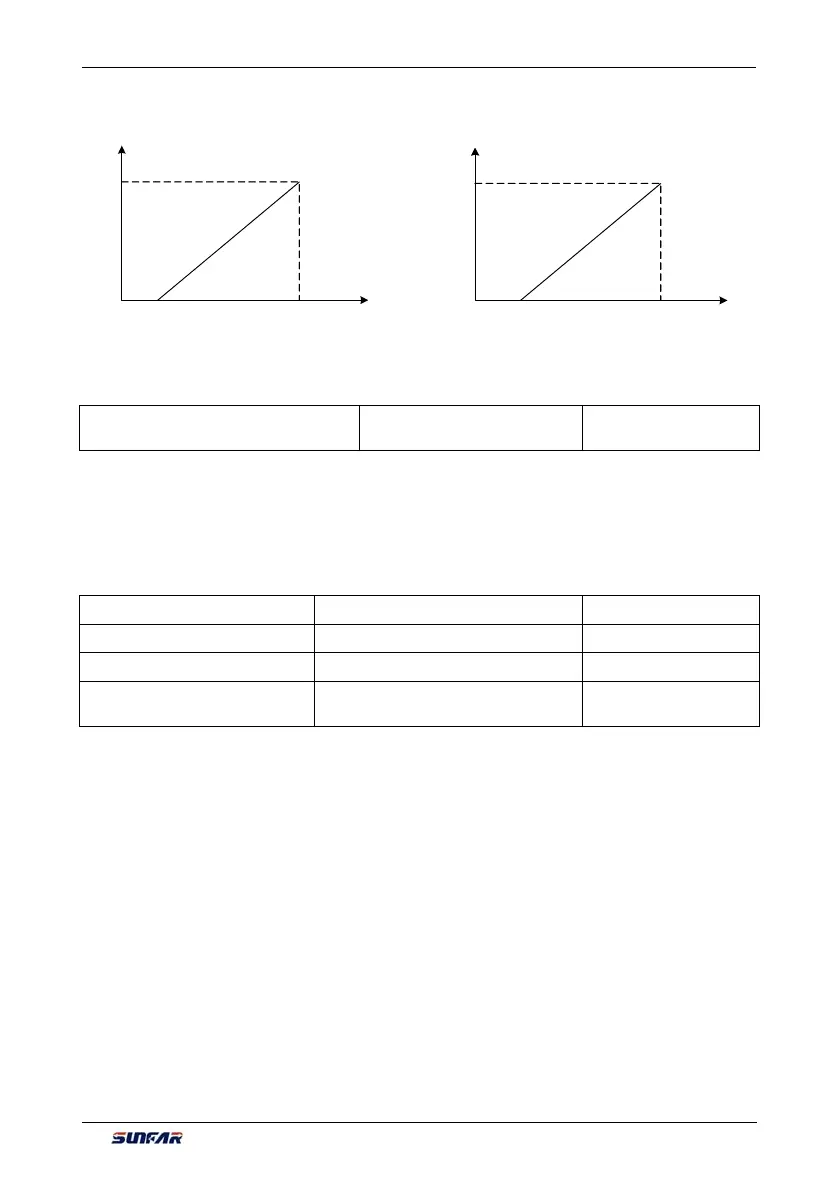
between feedback value of process PID and analog port can be altered with this group of parameters. The
corresponding relationship is shown in Figure 7-53.
Analog feedback
quantity
[F7.0.13]/[F7.0.15]
100%
0
[F7.0.12]/[F7.0.14]
Feedback value of process PID
Analog input
quantity
[F7.0.05]/[F7.0.07]
100%
0
[F7.0.04]/[F7.0.06]
Set value of process PID
F7.0.16 Actual value multiplication
factor
Setting range: 0.01~100.00 Factory default: 1.00
This function is mainly applied in occasions of flow calculation with differential pressure. When the feedback
value is not in accordance with the given value of process PID, while there is a certain linear relation, this
group of parameters can be selected to make it accordant of the meaning expressed by feedback value and
given value of process PID. For example, if the given value of process PID means flow of the pipe, feedback
value of process PID means flow rate of the pipe, supposing the set value of this parameter means cross
sectional area (CSA) of the pipe, then the given value and feedback value of process PID shall be in
accordance.
F7.0.17 Proportional gain Setting range: 0.0~100.00 Factory default: 2.00
F7.0.18 Integral time Setting range: 0.0, 0.1~1000.0Sec. Factory default: 20.0
F7.0.19 Differential quotient Setting range: 0.0,0.01~10.00 Factory default: 0.0
F7.0.20 Differential inertia
filtering time
Setting range: 0.01~100.00 Sec. Factory default: 10.00
Proportional gain defines the magnification of deviation. The bigger the set value is, the faster the response
of system is, but oscillation can be caused when it's too big; the smaller the set value is, the slower the
response is. Adjusting only with proportional gain will not eliminate the deviation completely. In order to
eliminate the remained deviation, integral time shall be selected. The smaller the integral time is set, the
faster the response is, but oscillation of system can be caused when it's too big or too small.
Differentiator can make response to the change rate of deviation. The larger the change
is, the larger the
output gain is, that is, its gain is in proportion to change rate of deviation.
But it won't make response to
constant deviation. When differential coefficient is 0.0, it means the differential function closing the controller.
Differential function can improve the responsibility of system.
The larger the differential coefficient is set, the stronger the differential function is. In general system, there is
no need to introduce differential link.
Larger differential inertia filtering time can make the differential adjustment more smoother, generally, It is set
in proportion to the inertia of system.
Figure 7-53 Sketch of corresponding
elationshi
of
eedback
alue of
rocess PID
Figure 7-52 Sketch of set value of process PID