Functional Parameter Table
V560 Series High Performance Closed-Loop Vector Inverter User Manual
78
Function
Code
Name Setting Range and Description
Minimum
Unit
Factory
Default
Change
Limit
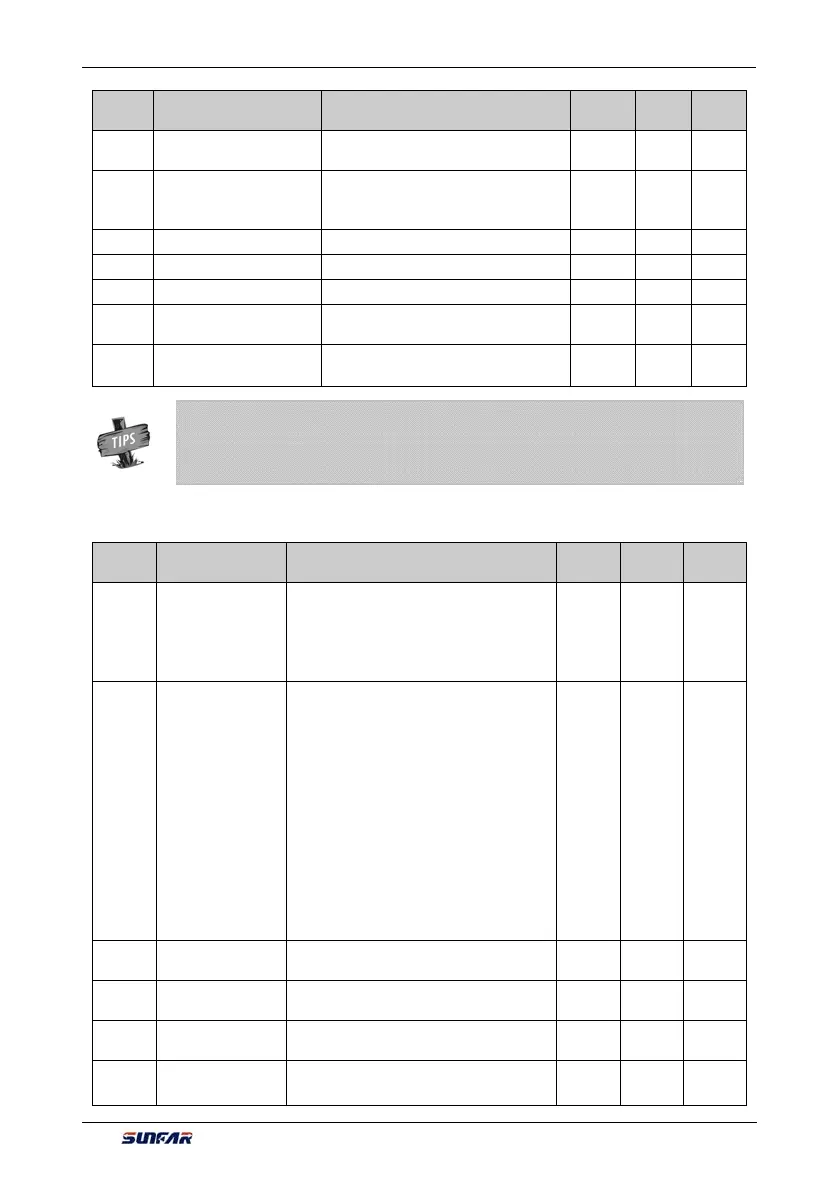
F9.1.37
Differential output filtering
constant 3
0.01~25.00Sec. 0.01 5.00
F9.1.38
Compensation PID
output filtering time
coefficient 3
0.0, 0.01~20.00Sec. 0.01 1.00
F9.1.39 Proportional gain 4 0.0~100.00 0.01 2.00
F9.1.40 Integration time 4 0.0, 0.01~100.00Sec. 0.01 2.00
F9.1.41 Differential coefficient4 0.0, 0.01~10.00 0.01 0.0
F9.1.42
Differential output filtering
constant 4
0.01~25.00Sec. 0.01 5.00
F9.1.43
Compensation PID output
filtering time coefficient 4
0.0, 0.01~20.00Sec. 0.01 1.00
6.2.40 MODBUS FIELDBUS (STANDARD EXPANSION CARD CONFIGURATION)
Function
Code
Name Setting Range and Description
Minimum
Unit
Factory
Default
Change
Limit
FA.0.00
Communication
card connection
and bus status
0: The communication card not connected
1: Standard MODBUS communication card
connected
2: Listen only status
3: Communication interrupted
1 — R
FA.0.01
Configuration
parameter
_ _ _ X: Baud rate selection
0: 1200kbit/s
1: 2400kbit/s
2: 4800kbit/s
3: 9600kbit/s
4: 19200kbit/s
5: 38400kbit/s
6: 76800kbit/s
_ _ X _: Data format
0: 1-8-1-N, RTU
1: 1-8-1-E, RTU
2: 1-8-1-O, RTU
3: 1-8-2-N, RTU
1 0003 ×
FA.0.02
The device station
address
0~247(0 stands for broadcasting address) 1 1 ×
FA.0.03
The device
response delay
0~1000ms 1 5ms
FA.0.04
Communication
failure judging time
0.01~10.00Sec. 0.01 1.00 ×
FA.0.05
Communication
failure action
0: Deceleration stop
1: Run as per last received command
1 0
¾ 100% PID setting corresponds to 100% rated output current of the equipment, motor rated
torque and rated power, so it needs to appropriately set up the feedback factor, output
torque and power to be values with symbols according to actual application.