Functional Parameter Table
V560 Series High Performance Closed-Loop Vector Inverter User Manual
79
Function
Code
Name Setting Range and Description
Minimum
Unit
Factory
Default
Change
Limit
FA.0.06
Selection of
communication
configuration files
0: SUNFAR standard configuration file 1
1: SUNFAR standard configuration file 2
(Reserved)
1 0
FA.0.07 —— ——
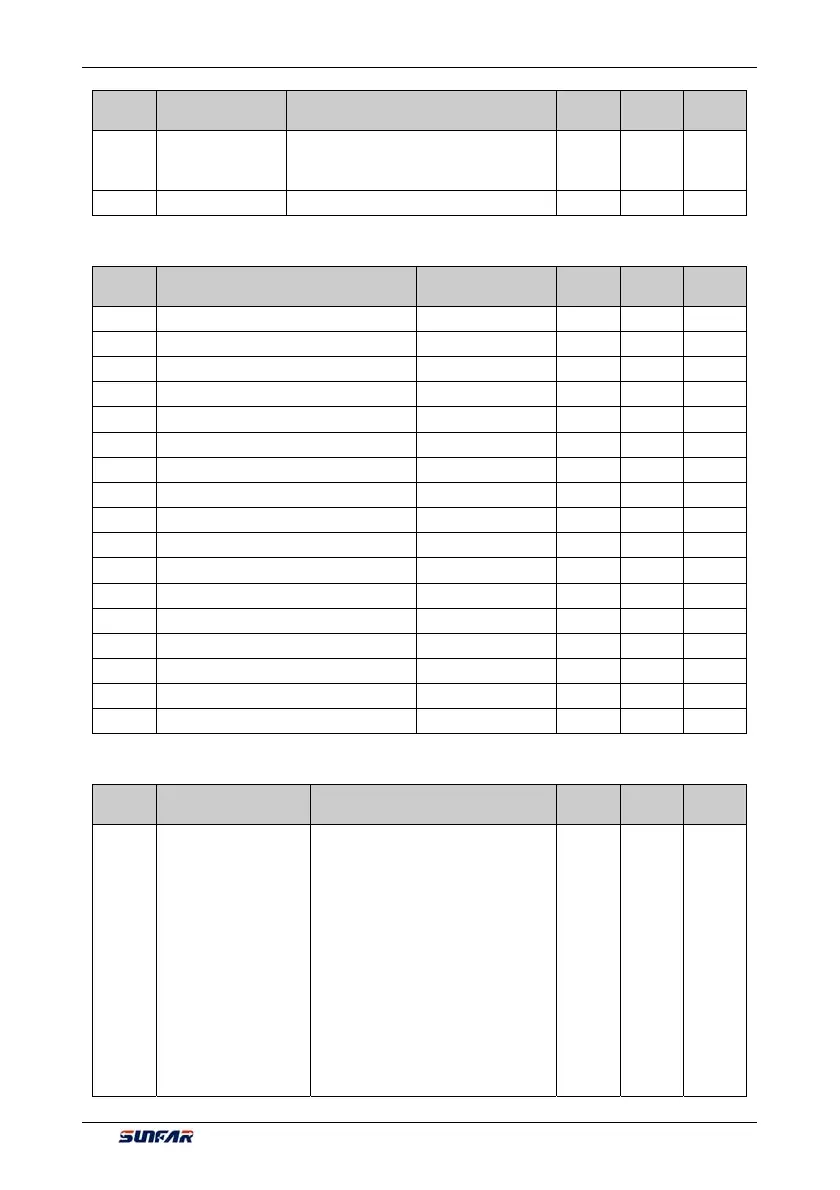
6.2.41 MAPPING ACCESS PARAMETER
Function
Code
Name
Setting Range and
Description
Minimum
Unit
Factory
Default
Change
Limit
FA.1.08 Mapping application parameter 1 (H) F0.00 ~ FF.55 1 F0.29 ×
FA.1.09 Mapping application parameter 2 (H) F0.00 ~ FF.55 1 F0.29 ×
FA.1.10 Mapping application parameter 3 (H) F0.00 ~ FF.55 1 F0.29 ×
FA.1.11 Mapping application parameter 4 (H) F0.00 ~ FF.55 1 F0.32 ×
FA.1.12 Mapping application parameter 5 (H) F0.00 ~ FF.55 1 F0.32 ×
FA.1.13 Mapping application parameter 6 (H) F0.00 ~ FF.55 1 F0.32 ×
FA.1.14 Mapping status parameter 1 (H) d0.00 ~ d1.49 1 d0.00
FA.1.15 Mapping status parameter 2 (H) d0.00 ~ d1.49 1 d0.01
FA.1.16 Mapping status parameter 3 (H) d0.00 ~ d1.49 1 d0.02
FA.1.17 Mapping status parameter 4 (H) d0.00 ~ d1.49 1 d0.03
FA.1.18 Mapping status parameter 5 (H) d0.00 ~ d1.49 1 d0.04
FA.1.19 Mapping status parameter 6 (H) d0.00 ~ d1.49 1 d0.05
FA.1.20 Mapping status parameter 7 (H) d0.00 ~ d1.49 1 d0.06
FA.1.21 Mapping status parameter 8 (H) d0.00 ~ d1.49 1 d0.07
FA.1.22 Mapping status parameter 9 (H) d0.00 ~ d1.49 1 d0.08
FA.1.23 Mapping status parameter 10 (H) d0.00 ~ d1.49 1 d0.09
FA.1.24 — — — —
6.2.42 COMMUNICATION LINKAGE SYNCHRONOUS CONTROL
Function
Code
Name Setting Range and Description
Minimum
Unit
Factory
Default
Change
Limit
FA.2.25
Coupling synchronous
control options
_ _ _ X: Selection of coupling
function
0: Void
1: The device is the salve device
2: The device is the master device
_ _ X _: Linkage target value (Master
device parameter)
0: Proportional linkage of frequency
/revolution set value
1: Proportional linkage of frequency
/revolution integrator output value
_ X _ _: Coupling command (slave
device parameter)
0: Independent control of slave
device(start and stop not linked)
1 0310 ×