Description Of Specific Functions
V560 Series High Performance Closed-Loop Vector Inverter User Manual
170
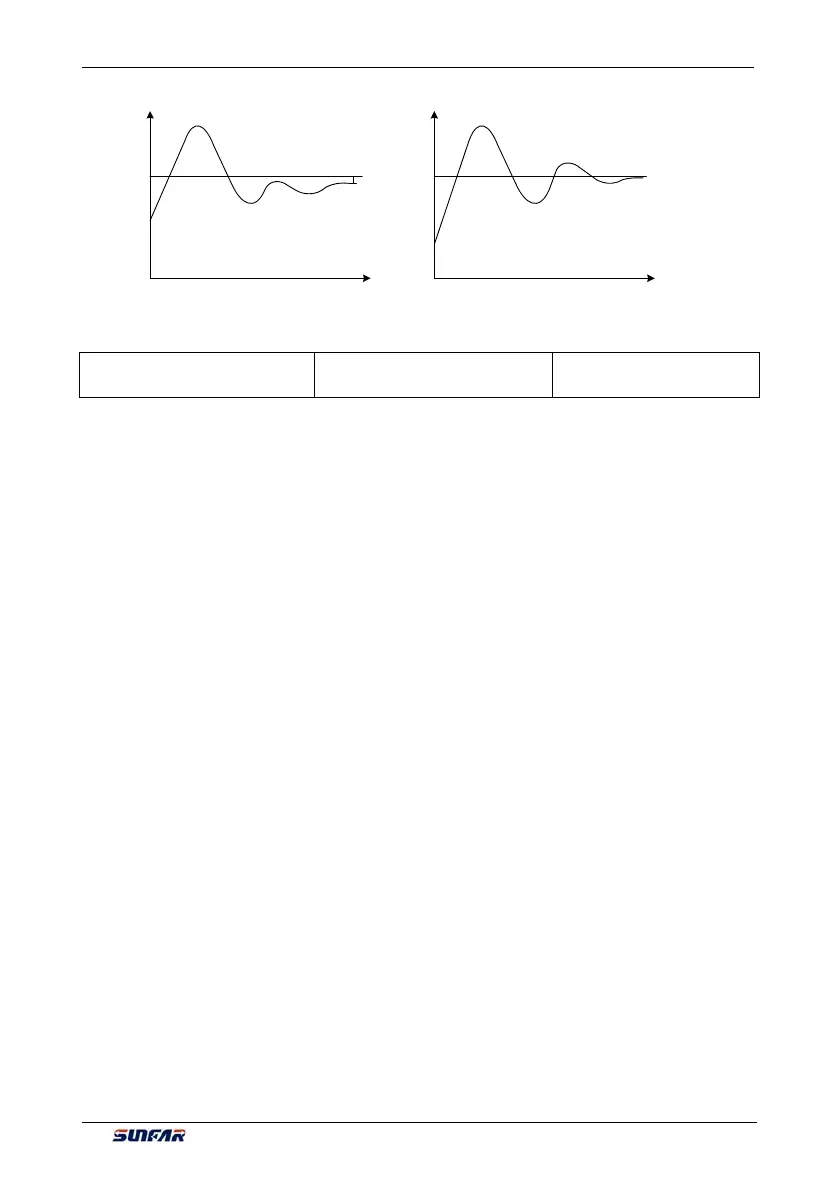
Deviation
Target value
Feedback
PID feedback
Without integral control
With integral control
Target value
Feedback
Time
Time
Deviation is 0 when
with integral control
F7.0.21 Configuration of
standard PID controller
Setting range: 0000~0111 Factory default: 0000
_ _ _ X : Dviation polarity
0: Positive deviation
When feedback signal gets weaker, PID output is increased.
1: Negative deviation
When feedback signal gets weaker, PID output is decreased.
_ _ X _ : Output polarity
0: Single polarity 1: Dual polarity
For single polarity of PID control mode, output of PID adjuster is always positive value, lower limit is 0. For
frequency settings, operation direction of frequency inverter is determined with external control order, while
PID output can't change the operation direction. Generally, it applies for devices without motor reversal for
water and pressure delivery. Refer to Figure 7-55-A.
For dual polarity of PID control mode, output of PID adjuster is negative value. For frequency settings,
operation direction of frequency inverter is determined with external control order and "Exclusive OR"
calculation of PID output direction, and PID output can change the operation direction. If the direction lock
parameter (F0.1.17) is valid, efficient PID output shall take the absolute value. Refer to Figure 7-55-A and
Figure 7-55-B.
Figure 7-54 Function of integral control