1. In your Robot Program, select the place or node where you wish to
add a fixed waypoint.
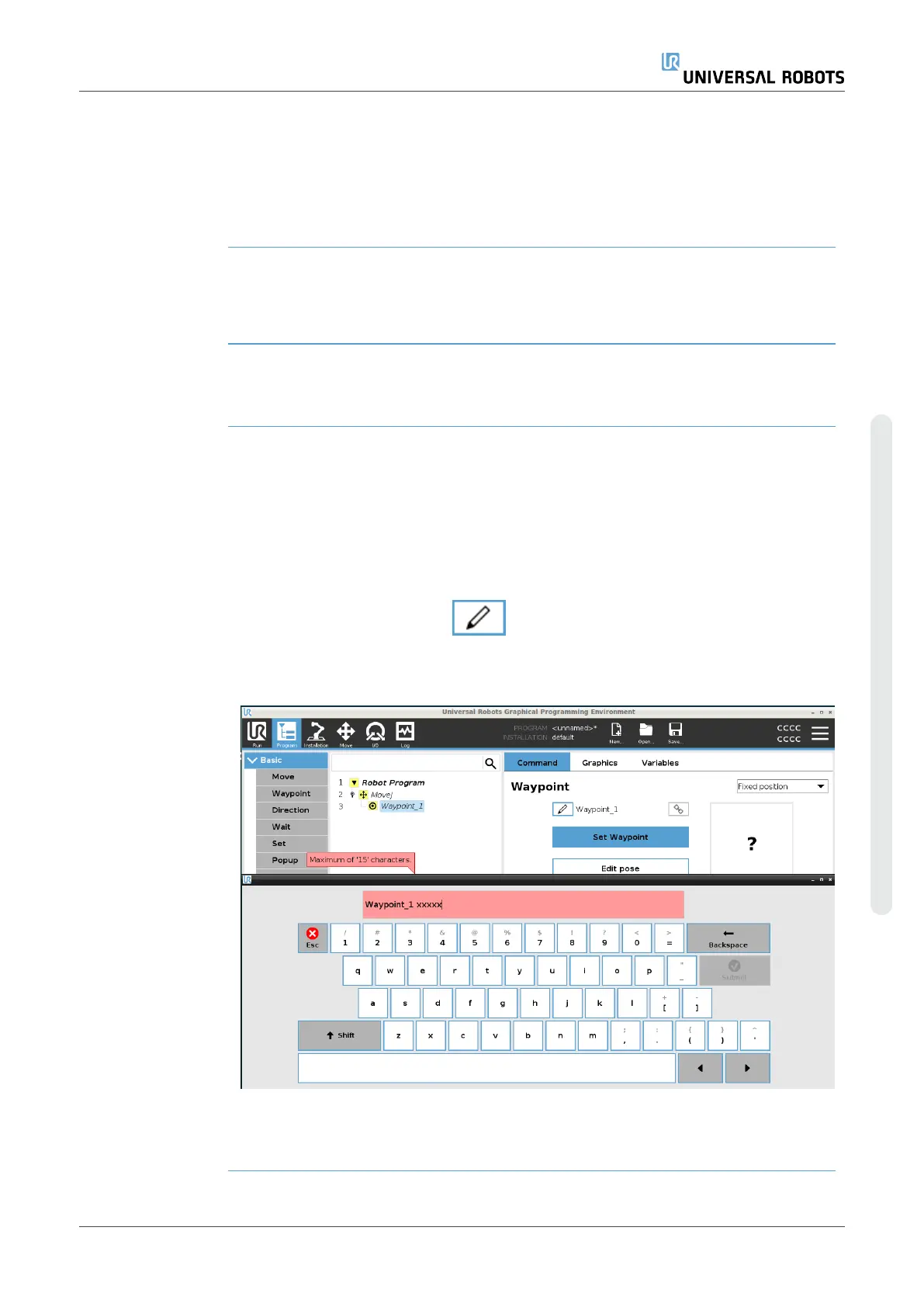
2. Under Basic, tap Waypoint.
3. Select your newly added waypoint in the robot program.
4.
Tap .
How you move the robot arm to set the waypoint depends very much on
your robot program, the application what you are creating, the TCP
configuration, etc.
There is no one best way to set the waypoint.
•
If you want to move the robot arm so that the TCP moves linearly, use
the TCP arrows.
•
If you want to move the robot arm with Freedrive, hold the Freedrive
button.
•
If you know the exact coordinate location for the next waypoint, then
you can use the tool position to move the robot arm.
•
If you want to move a specific joint, use the Joint Position values
User Manual 201 UR16e
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.