Add a relative
waypoint to a robot
program
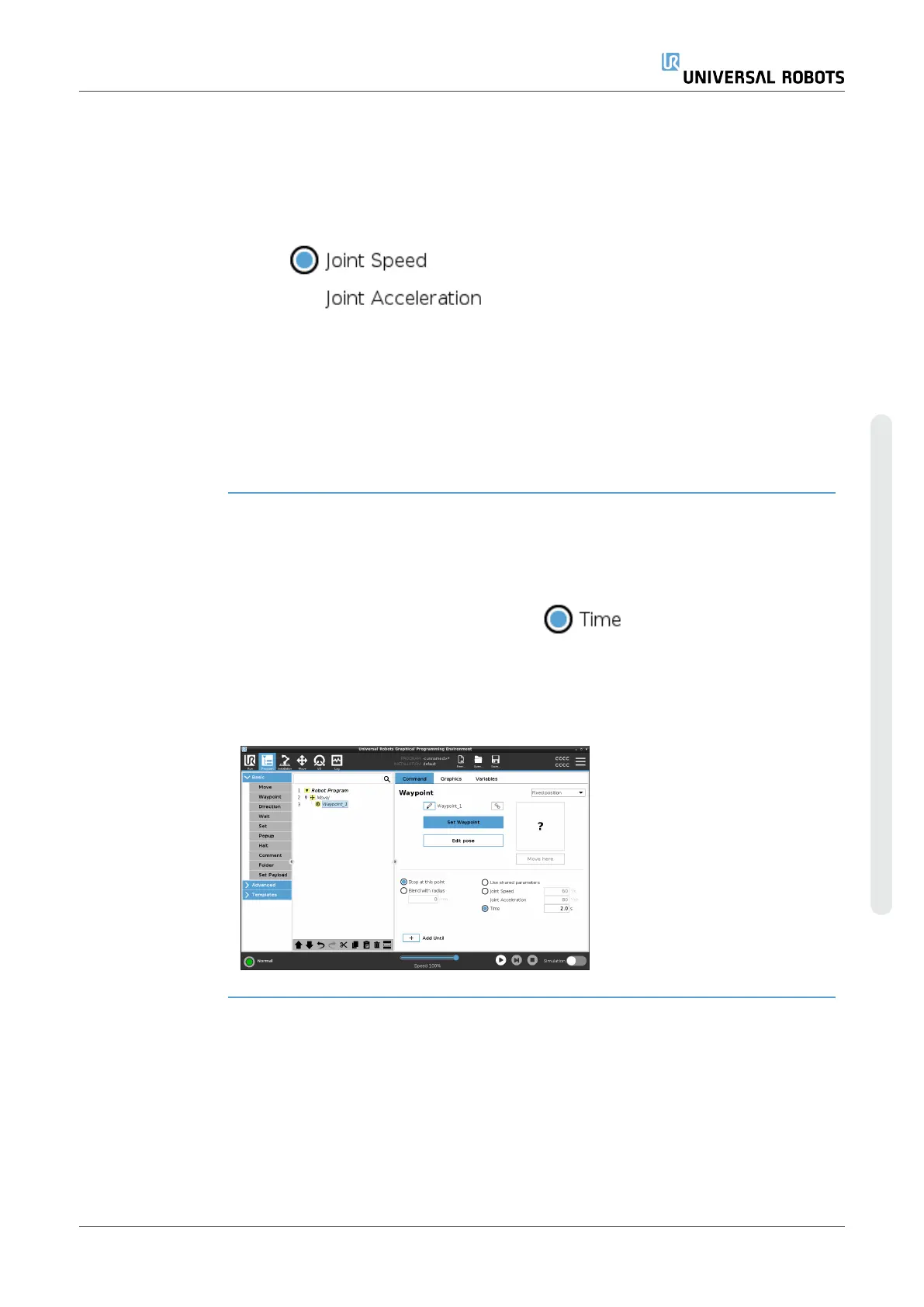
1. In the Program tab, select the Basic menu
2. Tap Waypoint
a. Notice the selector is automatically set to Fixed position
b. Change the waypoint to Relative position.
3. Set the first waypoint (from point...)
4. Set the second waypoint (...to point)
Detail The movement between two relative waypoints is always the shortest path
for the robot depending on the move type.
The distance for relative waypoints refers to the Cartesian distance
between the TCP in the two positions. The angle states how much the TCP
orientation changes between the two positions, or more precisely, the
length of the rotation vector describing the change in orientation.
It does not matter where the relative waypoint position was located around
the robot, before the program moved into the relative waypoint.
As soon as PolyScope moves to the relative waypoint in the program tree,
the robot moves from its current position, to the distance and in the
direction the relative waypoint has saved.
Repeated relative positions can move the robot arm out of its workspace.
User Manual 203 UR16e
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.