8.5 Work Home Position
8-47
8.5 Work Home Position
8.5.1 What is the Work Home Position?
The Work Home Position is a reference point for manipulator operations. It prevents interfer-
ence with peripheral device by ensuring that the manipulator is always within a set range as a
precondition for operations such as starting the line. The manipulator can be moved to the set
work home position by operation from the programming pendant, or by signal input from an
external device. When the manipulator is in the vicinity of the work home position, the work
home position signal turns ON.
8.5.2 Setting Work Home Position
Work Home Position Window
Operation Explanation
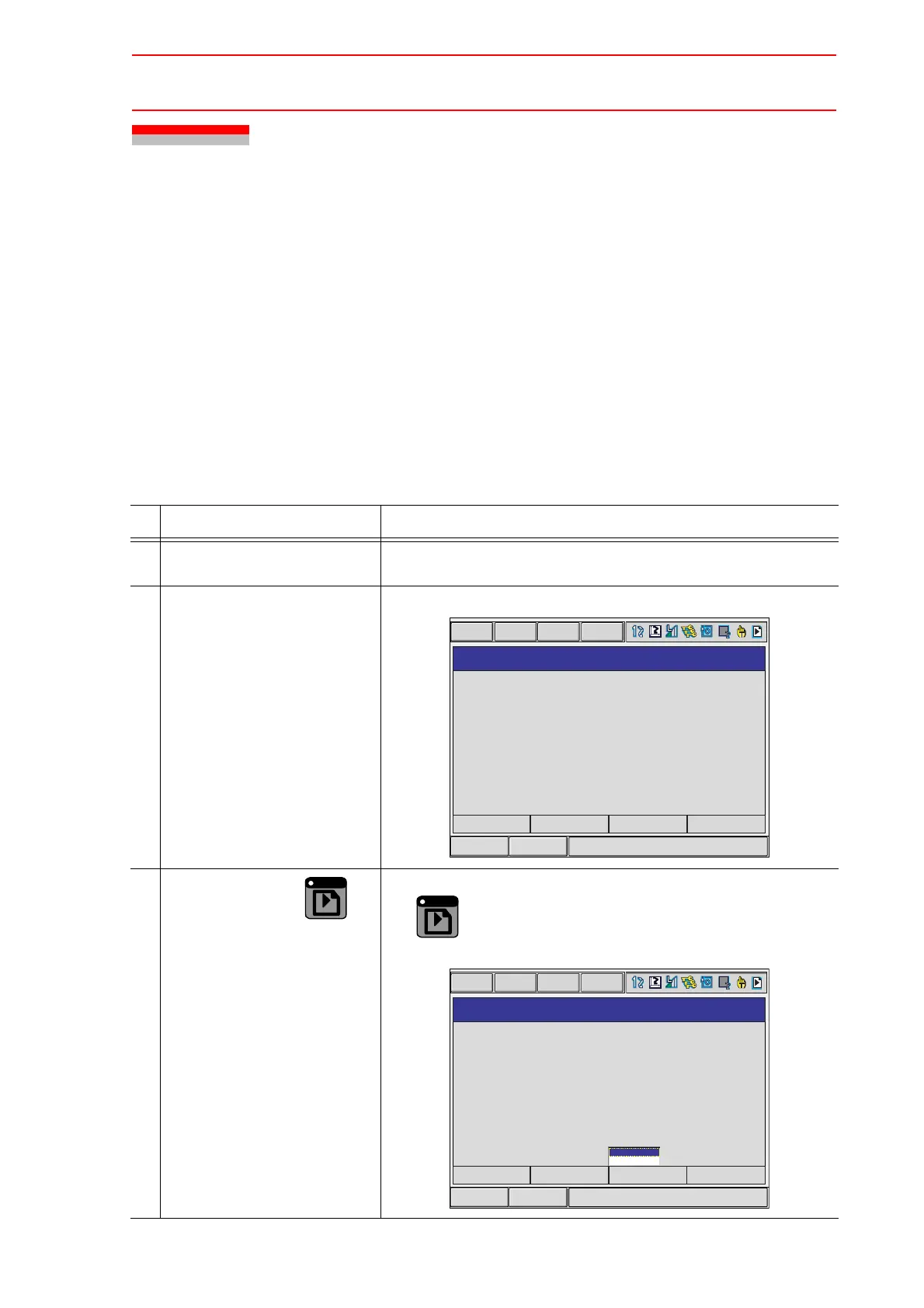
1 Select {ROBOT} under the
main menu.
2 Select {WORK HOME POS}. The WORK HOME POSITION window is appears.
3
Press the page key .
When two or more manipulators exist in the system, use the page
key to change the control group, or click on {PAGE} to
select the desired control group.
Short CutMain Menu
WORK HOME POSITION
ORIGIN CURRENT
DATA EDIT DISPLAY UTILITY
:S
L
U
R
B
T
0
0
0
0
0
0
0
0
0
0
0
0
R1
Available to move to and modify operation origin
PAGE
PAGE
GO BACK
PAGE
GO BACK
Short CutMain Menu
WORK HOME POSITION
ORIGIN CURRENT
DATA EDIT DISPLAY UTILITY
:S
L
U
R
B
T
0
0
0
0
0
0
0
0
0
0
0
0
R1
Available to move to and modify operation origin
PAGE
R1
R2
: ROBOT1
:
ROBOT2
 Loading...
Loading...















