258 Rockwell Automation Publication 2198-UM001I-EN-P - May 2019
Appendix D Motor Control Feature Support
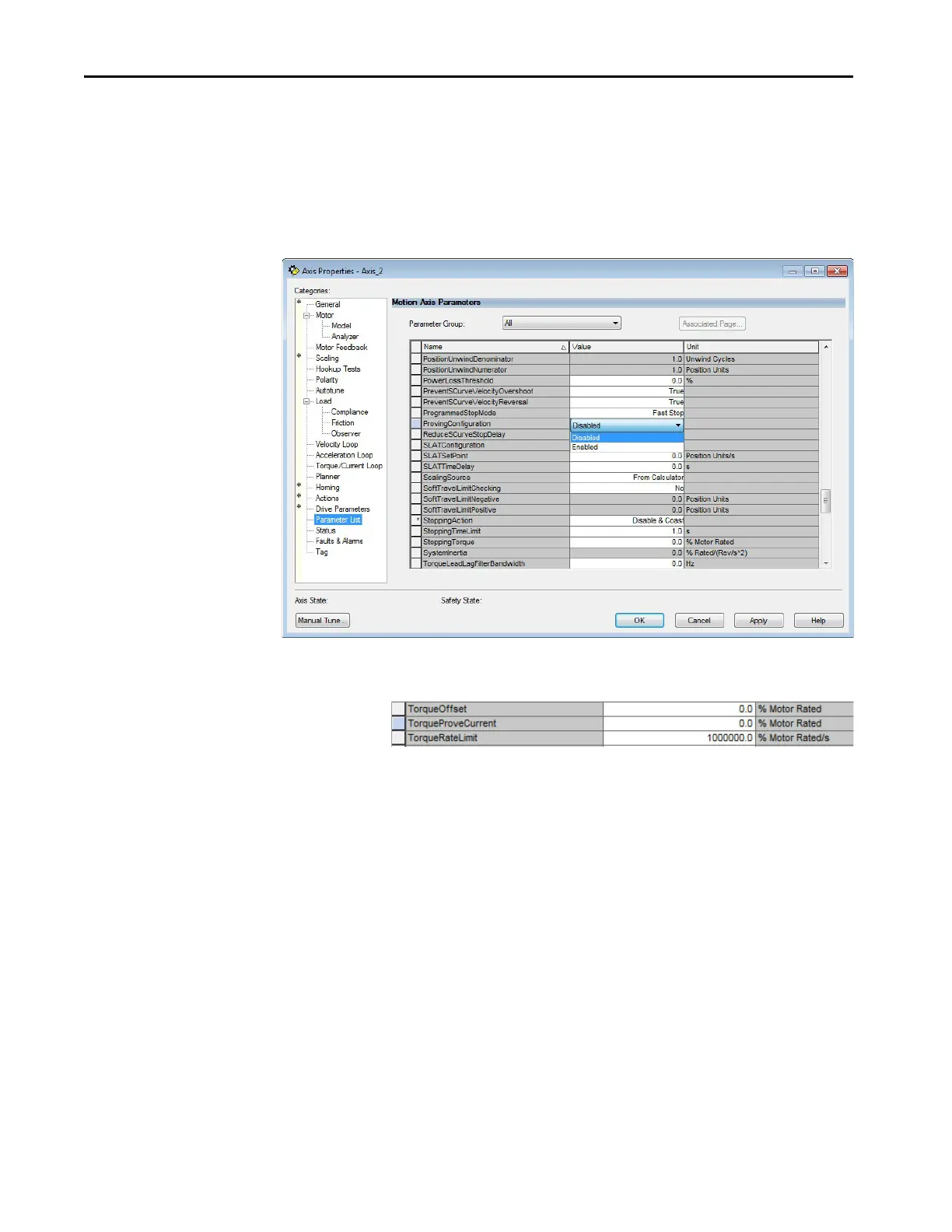
Phase-loss Detection Configuration
Follow these steps to configure the phase-loss detection attributes.
1. In the Controller Organizer, right-click an axis and choose Properties.
2. Select the Parameter List category and scroll to ProvingConfiguration.
3. From the ProvingConfiguration pull-down menu, choose Enabled to
enable the torque proving feature.
4. Enter a value in the TorqueProveCurrent attribute appropriate for your
application.
5. Click OK.
The TorqueProveCurrent attribute is active only if ProvingConfiguration is set
to Enabled. TorqueProveCurrent lets you specify the amount of current that is
used during the torque proving test and calculated as a percentage of motor
rating. The higher the TorqueProveCurrent value the more current the drive
delivers to the motor to verify that the motor phase wiring is available and
capable of that current level. High current levels conversely cause more thermal
stress and (potentially) can cause more torque to be driven against the motor
brake during the test. If the TorqueProveCurrent level selected is too small, the
drive cannot distinguish the proving current from noise, and in this case the
drive posts an INHIBIT M04 torque-proving configuration fault code. The
minimum amount of torque proving current depends on catalog number of the
drive.

 Loading...
Loading...






