172 Rockwell Automation Publication 2198-UM001I-EN-P - May 2019
Chapter 9 Kinetix 5500 Safe Torque-off - Hardwired Safety
Fault Codes
For fault code descriptions and possible solutions, see the Kinetix 5500 Fault
Codes.xlsx file attached to this publication. For more information about the
file, see Access the Attachments
on page 12.
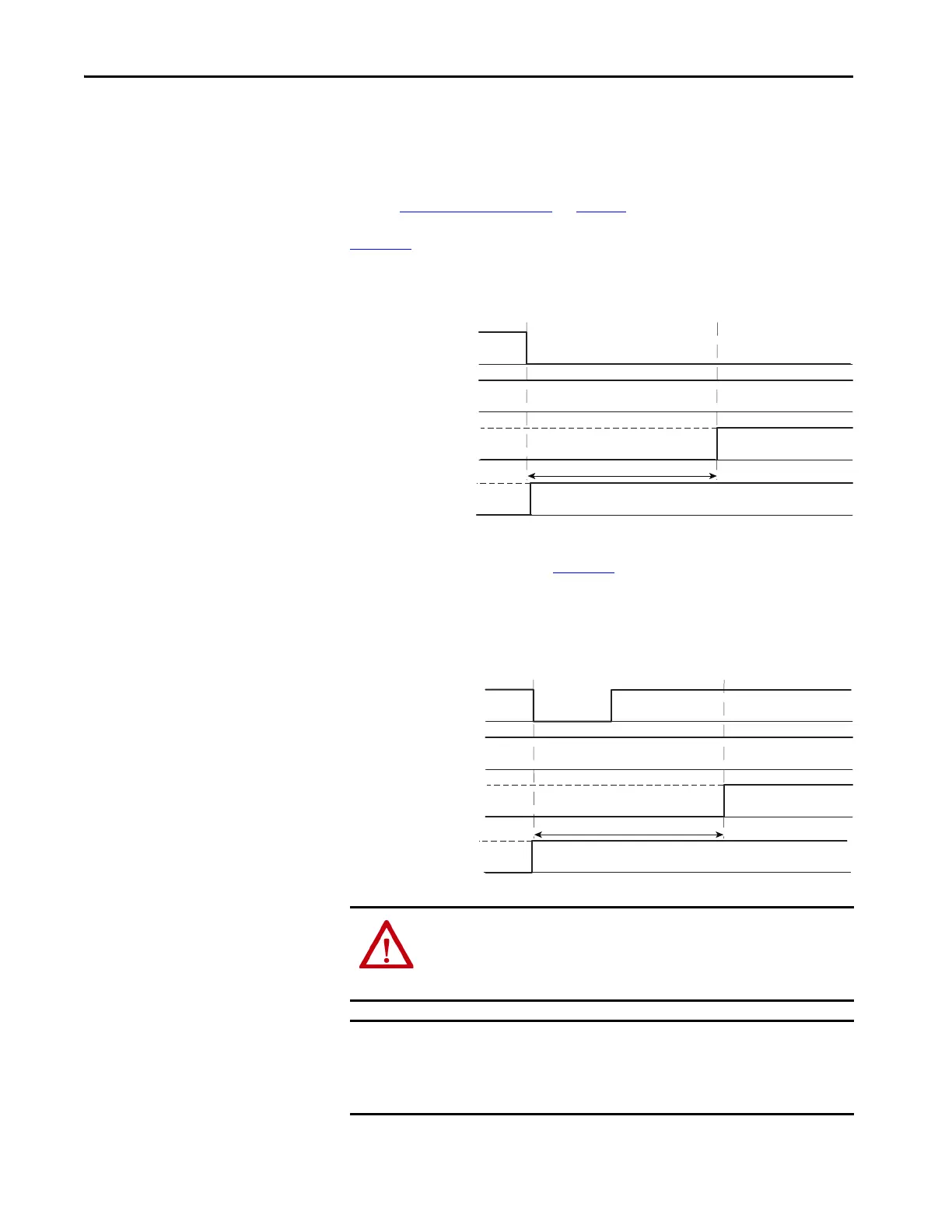
Figure 73
demonstrates when the safe torque-off mismatch is detected and a
GuardStopInputFault is posted.
Figure 73 - System Operation in the Event that the Safety Enable Inputs Mismatch
When one safety input is turned off, the second input must also be turned off,
otherwise a fault is asserted (see Figure 74
). The fault is asserted even if the first
safety input is turned on again, without the second input transitioning to the
ON state.
Figure 74 - System Operation in the Event that the Safety Enable Inputs Mismatch
Momentarily
24V DC
24V DC
0V DC
0V DC
1
1
0
0
1 Second
SafeTorqueOffInhibit
GuardStopInputFault
SS_IN_CH0
SS_IN_CH1
24V DC
24V DC
0V DC
0V DC
1
1
0
0
1 Second
SafeTorqueOffInhibit
GuardStopInputFault
SS_IN_CH0
SS_IN_CH1
ATTENTION: The safe torque-off fault is detected upon demand of the safe
torque-off function. After troubleshooting the STO function or performing
maintenance that might affect the STO function, the STO function must be
executed to verify correct operation.
IMPORTANT The GuardStopInputFault can be reset only if both inputs are in the OFF-
state for more than 1 second. After the fault reset requirement is satisfied,
an MAFR command in the Logix Designer application must be issued to reset
the GuardStopInputFault.

 Loading...
Loading...






