Rockwell Automation Publication 2198-UM001I-EN-P - May 2019 259
Motor Control Feature Support Appendix D
Phase Loss Detection Current Example
In this example, a 2198-H025-ERSx servo drive is paired with a
VPL-B1003T-C motor with 6.77 A rms rated current. Use the phase-loss
detection equation and table to calculate the initial minimum torque-proving
current as a percentage of motor rated current. Depending on the unique
characteristics of your application, the required torque-proving current value
can be larger than the initial recommended value.
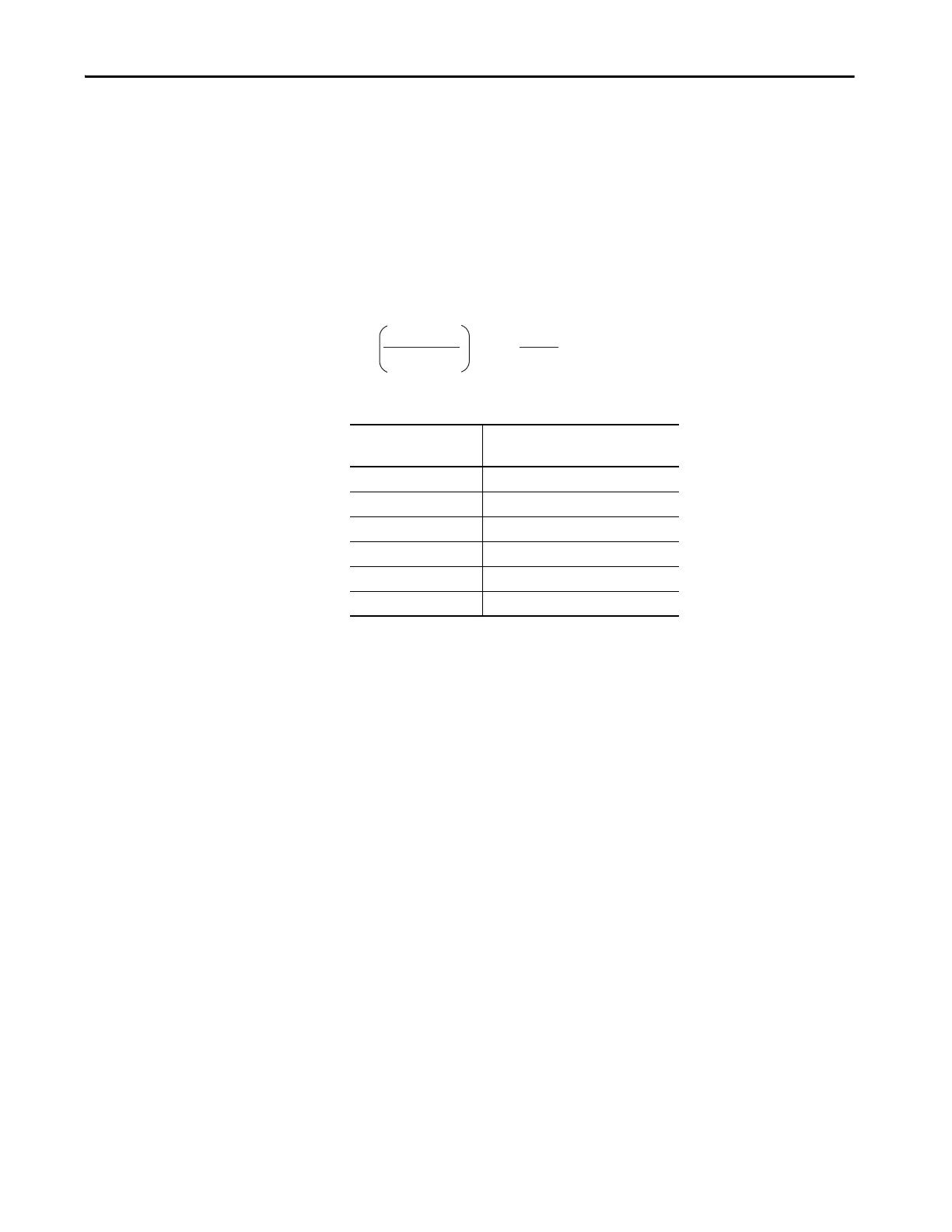
Figure 136 - Phase-loss Detection Equation
Table 96 - Recommended Phase-loss Detection Current
Rating From Table
x 100% =
Motor Rated Current
0.5746 A
6.77 A
x 100% =
8.49%
Drive Cat. No.
Phase-loss Detection Current, min
A, rms
2198-H003-ERSx 0.2514
2198-H008-ERSx 0.6285
2198-H015-ERSx 1.257
2198-H025-ERSx 2.011
2198-H040-ERSx 3.268
2198-H070-ERSx 5.782

 Loading...
Loading...






