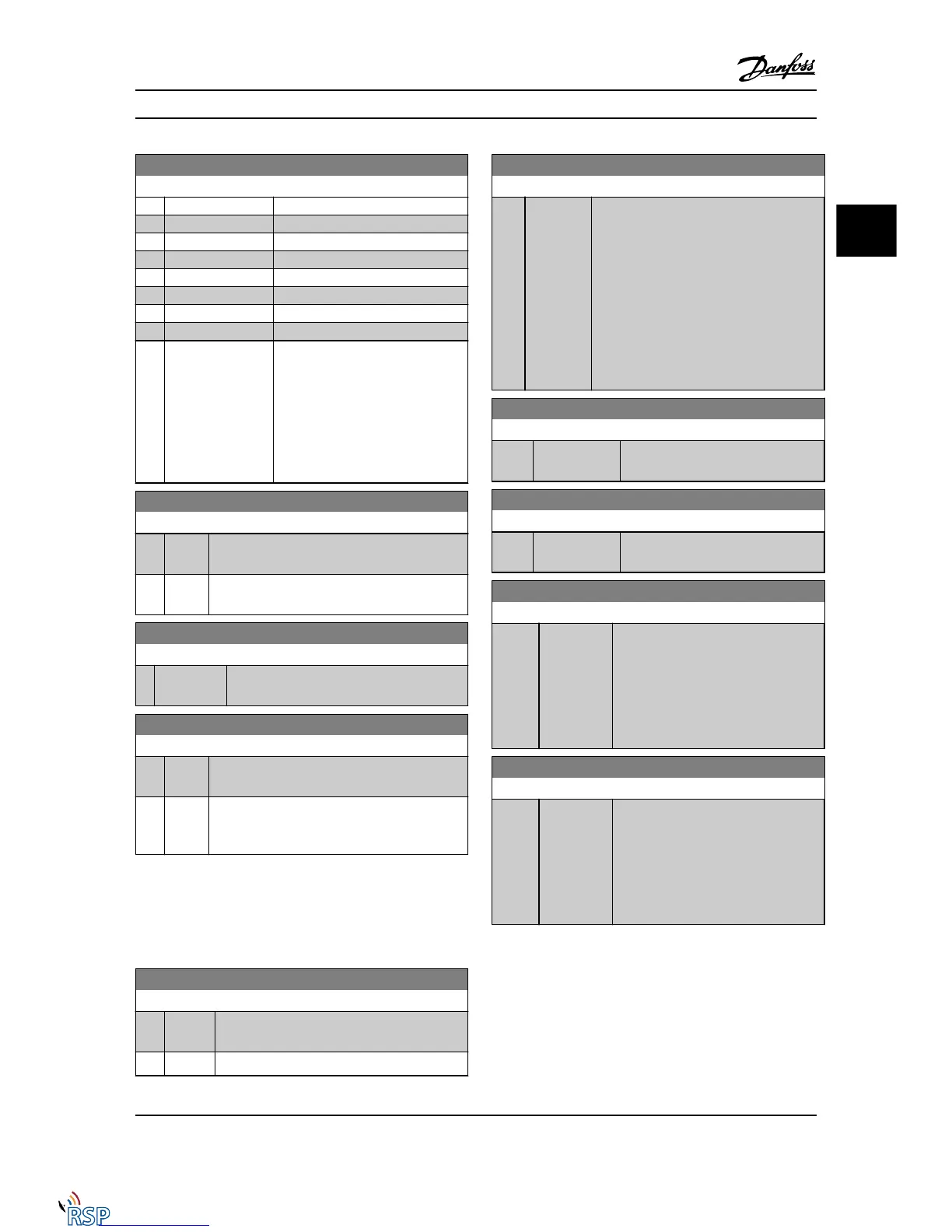
7-45 Process PID Feed Fwd Resource
Option: Function:
[1] Analog input 53
[2] Analog input 54
[7] Frequency input 29
[8] Frequency input 33
[11] Local bus reference
[20] Digital pot.meter
[21] Analog input X30-11
[22] Analog input X30-12
[32] Bus PCD
Selects a bus reference configured by
8-02 Control Word Source. Change
8-42 PCD write configuration for the
bus used in order to make the feed-
forward available in 7-48 PCD Feed
Forward. Use index 1 for feed-forward
[748] (and index 2 for reference
[1682]).
7-46 Process PID Feed Fwd Normal/ Inv. Ctrl.
Option: Function:
[0] * Normal Select Normal [0] to set the feed forward factor to
treat the FF resource as a positive value.
[1] Inverse Select Inverse [1] to treat the FF resource as a
negative value.
7-48 PCD Feed Forward
Range: Function:
0* [0 - 65535 ]
Read-out parameter where the bus 7-45 Process
PID Feed Fwd Resource [32] can be read.
7-49 Process PID Output Normal/ Inv. Ctrl.
Option: Function:
[0] * Normal Select Normal [0] to use the resulting output from
the process PID controller as is.
[1] Inverse Select Inverse [1] to invert the resulting output
from the process PID controller. This operation is
performed after the feed forward factor is applied.
3.9.6 7-5* Process PID Ctrl.
Parameter group 7-5* is only used if 1-00 Configuration
Mode is set to [7] Extended PID speed CL or [8] Extended
PID Speed OL.
7-50 Process PID Extended PID
Option: Function:
[0] Disabled Disables the extended parts of the process PID
controller.
[1] * Enabled Enables the extended parts of the PID controller.
7-51 Process PID Feed Fwd Gain
Range: Function:
1.00* [0.00 -
100.00 ]
The feed forward is used to obtain the
desired level, based on a well-known signal
available. The PID controller then only takes
care of the smaller part of the control,
necessary because of unknown characters.
The standard feed fwd factor in 7-38 Process
PID Feed Forward Factor is always related to
the reference whereas 7-51 Process PID Feed
Fwd Gain has more choices. In winder
applications, the feed fwd factor will typically
be the line speed of the system.
7-52 Process PID Feed Fwd Ramp up
Range: Function:
0.01 s* [0.01 - 10.00 s] Controls the dynamics of the feed
forward signal when ramping up.
7-53 Process PID Feed Fwd Ramp down
Range: Function:
0.01 s* [0.01 - 10.00 s] Controls the dynamics of the feed
forward signal when ramping down.
7-56 Process PID Ref. Filter Time
Range: Function:
0.001 s* [0.001 -
1.000 s]
Set a time constant for the reference first
order low-pass filter. The low-pass filter
improves steady-state performance and
dampens oscillations on the reference/
feedback signals. However, severe
filtering can be detrimental to dynamic
performance.
7-57 Process PID Fb. Filter Time
Range: Function:
0.001 s* [0.001 -
1.000 s]
Set a time constant for the feedback first
order low-pass filter. The low-pass filter
improves steady-state performance and
dampens oscillations on the reference/
feedback signals. However, severe
filtering can be detrimental to dynamic
performance.
Parameter Descriptions FC 300 Programming Guide
MG33MD22 - VLT
®
is a registered Danfoss trademark 3-83
3
3

 Loading...
Loading...










