Adaptive cruise control*
Adaptive Cruise Control (ACC) is based on
conventional cruise control to use radar and
camera sensors to monitor the lead vehicle and
actively control the speed of ego vehicle, thus
achieving the purpose of automatic following
cruise. Depending on whether the system
recognizes the target vehicle or not, the system
allows automatic switching between cruise
control and following cruise. ACC can also
actively control the speed of the vehicle when
the vehicle is cornering so as to improve the
safety of the vehicle.
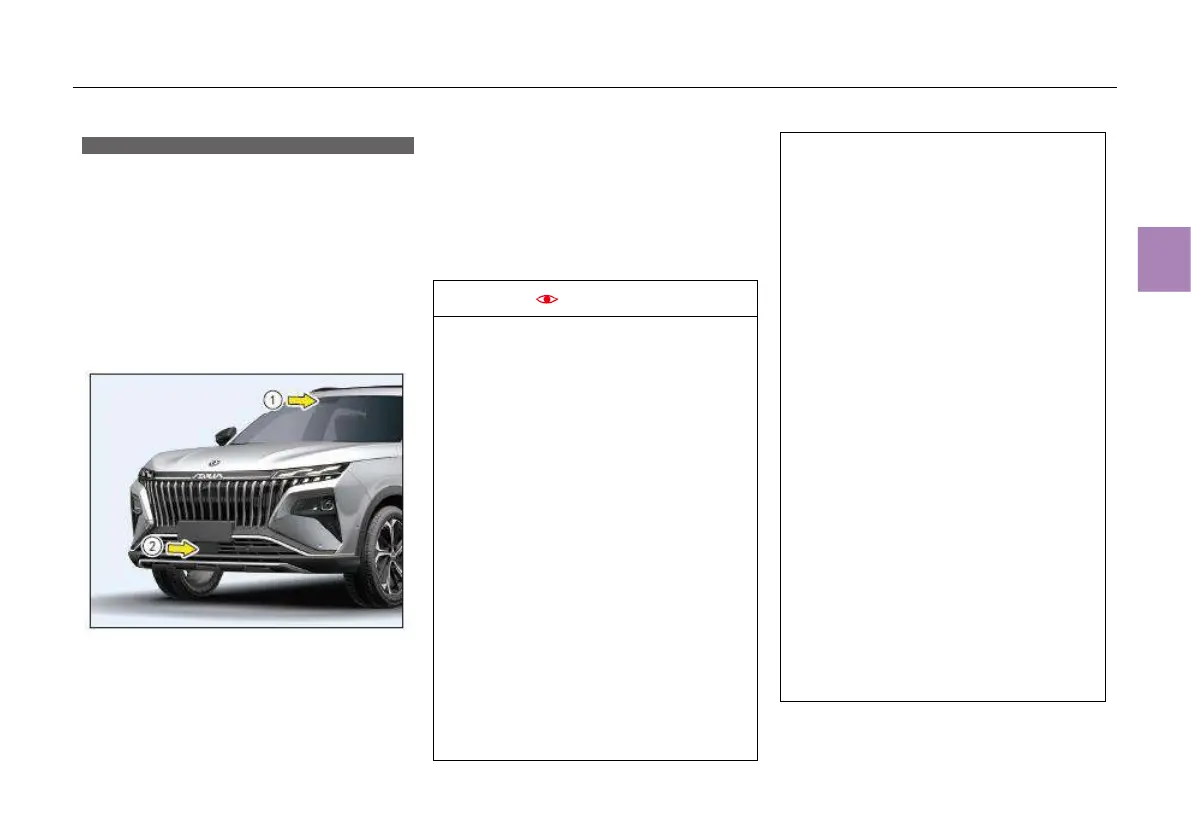
Camera sensor①: located at the middle of the
upper edge of the front windshield;
Radar sensor ②: located at the middle of the
lower edge of the front bumper.
The cruising speed of the ego vehicle and the
headway to the lead vehicle may be set through
the cruise control button on the steering wheel.
The vehicle may be set to cruise at a constant
speed in the range of 30~150 km/h, the headway
to the lead vehicle may be set for following
cruise at a speed of 0~150 km/h, and the vehicle
can stop after following stop.
● The ACC system is a driving assistance
system designed to improve driving
comfort. However, it cannot take place of
the driver in driving. Even if the ACC
system is active, the driver must drive
carefully, maintain control of the vehicle at
all times, and is required to obey traffic
rules.
● When the vehicle is running, depressing
the brake pedal will exit the ACC system
immediately;
● In some cases (too high relative speed of
the vehicle ahead, sudden lane change,
too short safety distance, etc.), the
system does not have enough time to
reduce the relative speed. Therefore, the
driver must react in good time.
● When the ACC system is working, if the
driver depresses the accelerator pedal,
the vehicle will be taken over by the
driver. The distance control function of the
ACC system will not be activated.
● The ACC system cannot detect oncoming
vehicles in the same lane.
● The ACC system is suitable for driving on
expressways and good roads, but not on
complicated urban roads, mountain roads,
on-ramps or in tunnels.
● The ACC system can recognize cars,
trucks, motorcycles and other motor
vehicles as following targets and slow
down, but cannot recognize pedestrians
or other obstacles on the road.
● Target selection may be delayed or
disturbed when the vehicle is entering and
exiting curves. The ACC system may not
brake as expected or brake too late in
these cases.
● If the vehicle is too close to vehicles in
adjacent lanes (or vehicles in adjacent
lanes are too close to the vehicle's lane),
it is possible that the system reacts to
adjacent vehicles and performs braking.
● If a vehicle changes lanes into the driving
path of the vehicle and is within the
detection range of ACC system, when it is
identified as the target vehicle, the system
may react to it, which may lead to forced
braking or untimely braking. The driver
should take over the vehicle control in
time to avoid traffic accidents.
● In the case of heavy rain, heavy snow,
etc., the detection of the radar sensor
may be interfered, and the ACC system
will automatically exit at this time.