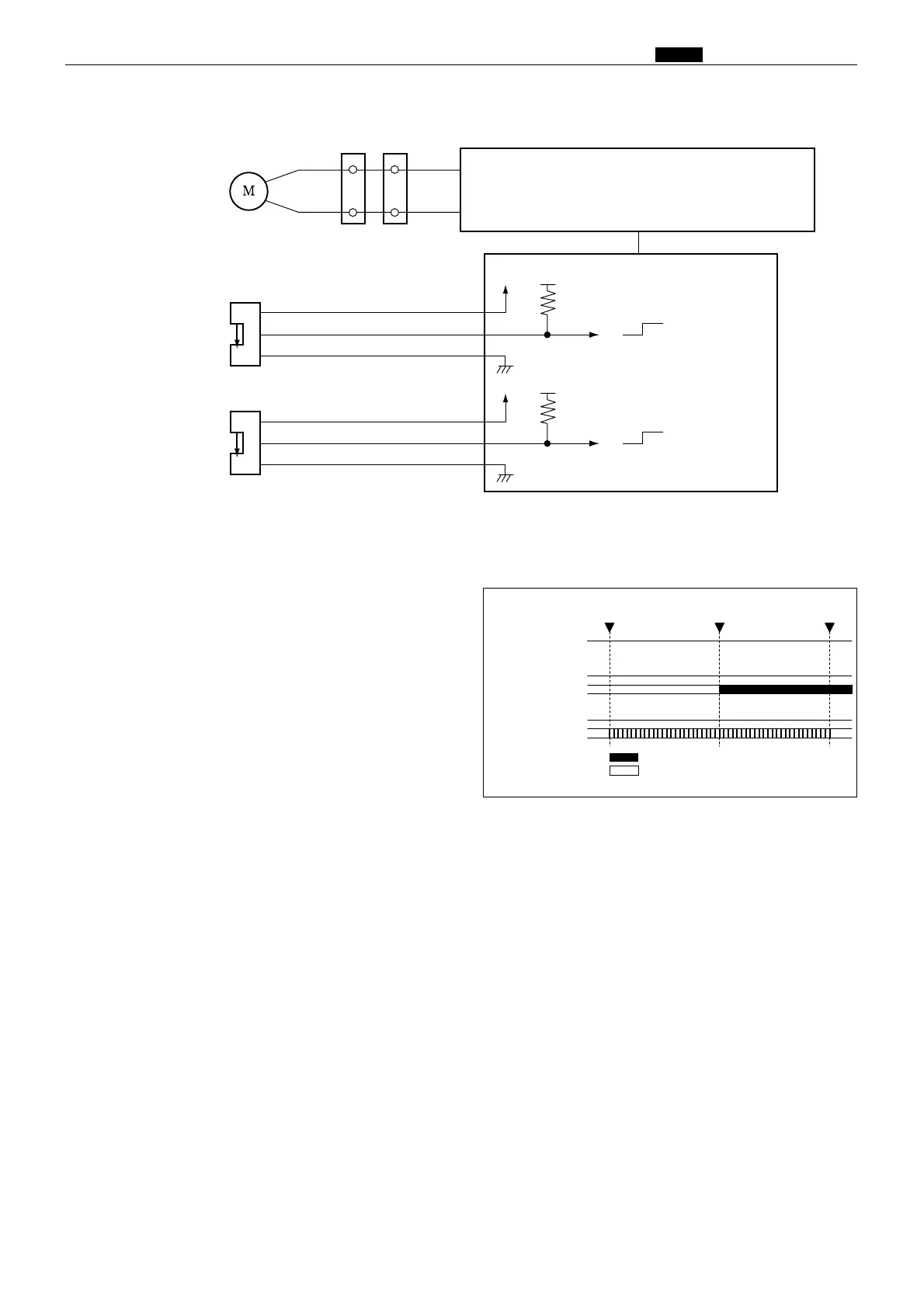
Circuit
Operation
Top and bottom limit of print position is detected by
the top/bottom encoder sensor and the center sensor.
The center position is detected by the standard
position sensor.
The top/bottom encoder sensor detects the
top/bottom motor rotation.
The main PCB unit controls the number of
top/bottom motor rotations with the top/bottom
encoder sensor signal.
Operation with the Power ON
The printing position returns to the standard
position by operating with the power ON,
depending on the sensor state as follows.
2
When positioned between the standard position
and the bottom limit:
Rotate the printing position motor normally (CW)
to return the printing position to the standard.
2
When positioned between the standard position
and the top limit:
Rotate the printing position motor reversely
(CCW) to return the printing position to the stan-
dard.