9. Tighten 4 M10x25-8.8-A2K Allen screws with a torque wrench in diag-
onally opposite sequence. Increase the tightening torque to the speci-
fied value in several stages.
10. Plug connectors XM1 and XP1 into the right-angle connectors. The
pins and coding elements of the connectors must be taken into con-
sideration. When inserting the connectors, turn them until they clearly
lock into the coding elements (twist-proof).
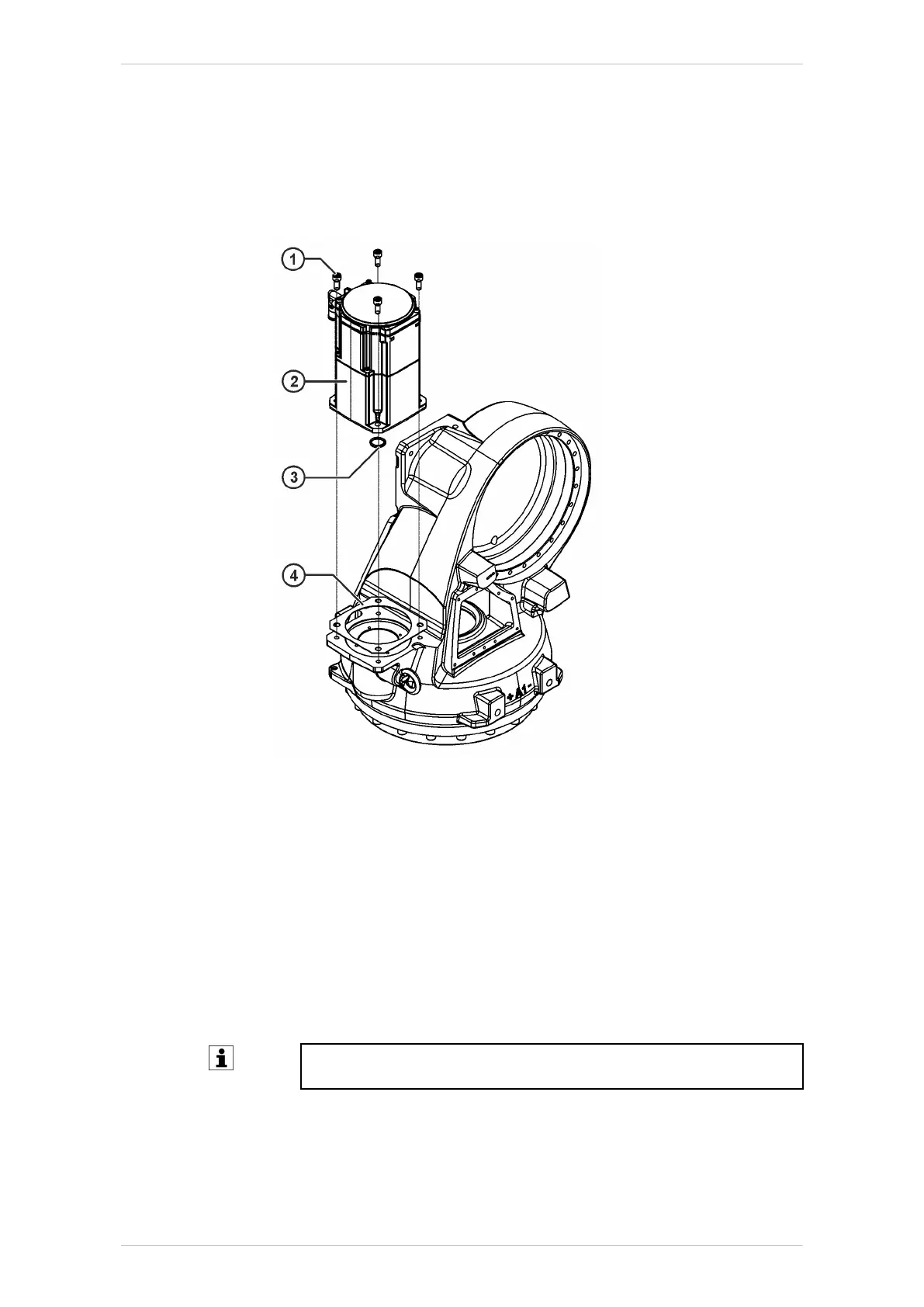
Fig. 9-14: Motor A1 Foundry
1 M10x25-8.8-A2K Allen screw (4x)
2 Motor A1
3 O-ring 23x4
4 Seal
9.4.1.3 Concluding work
The following concluding work must be carried out:
• Move A1 of the robot and look out for irregularities.
• Carry out mastering of A1.
Detailed information about mastering is contained in the operating
and programming instructions for end users or system integrators.
KR IONTEC
250/344 | www.kuka.com MA KR IONTEC V4 | Issued: 11.05.2021
Repair

 Loading...
Loading...

