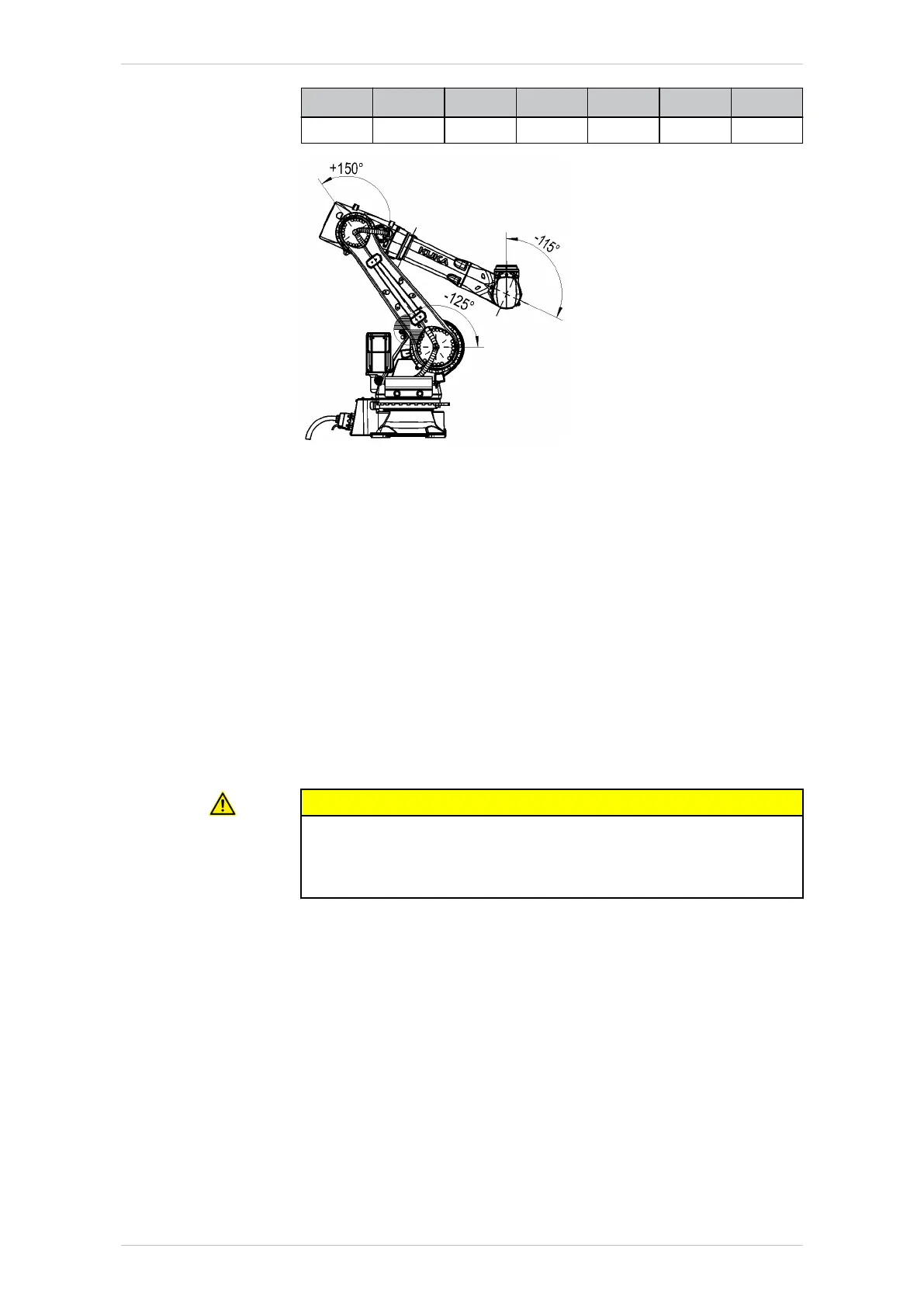
Axis A1 A2 A3 A4 A5 A6
Angle 0° -125° +150° 0° -115° 0°
Fig. 10-1: Transport position
4. Secure the robot by activating the EMERGENCY STOP device and
then shut down the robot.
10.1.2 Removing the robot
1. Release and unplug all peripheral connections.
2. Release and unplug the motor cable and data cable connectors.
3. Unscrew the M8 hexagon nut from the ground conductor, take off the
washers and lock washers and pull off the ground conductor.
4. Unscrew 8 M20x60-8.8-A2K hexagon bolts.
5. Lift the robot vertically off the mounting surface using a crane or fork
lift truck and transport it away.
Take care not to damage the 2 locating pins when lifting.
CAUTION
If the robot is caught on the mounting surface, it may come free
abruptly, endangering persons and property.
The robot must stand loosely on the mounting surface; completely
remove all fastening materials and any adhesives.
KR IONTEC
312/344 | www.kuka.com MA KR IONTEC V4 | Issued: 11.05.2021
Decommissioning, storage and disposal

 Loading...
Loading...

