10 Decommissioning, storage and disposal
10.1 Decommissioning
Description
This section describes all the work required for decommissioning the robot
if the robot is to be removed from the system. After decommissioning, it is
prepared for storage or for transportation to a different location.
Following its removal, the robot can be transported by means of round
slings and a crane (>>> 6 "Transportation" Page 167).
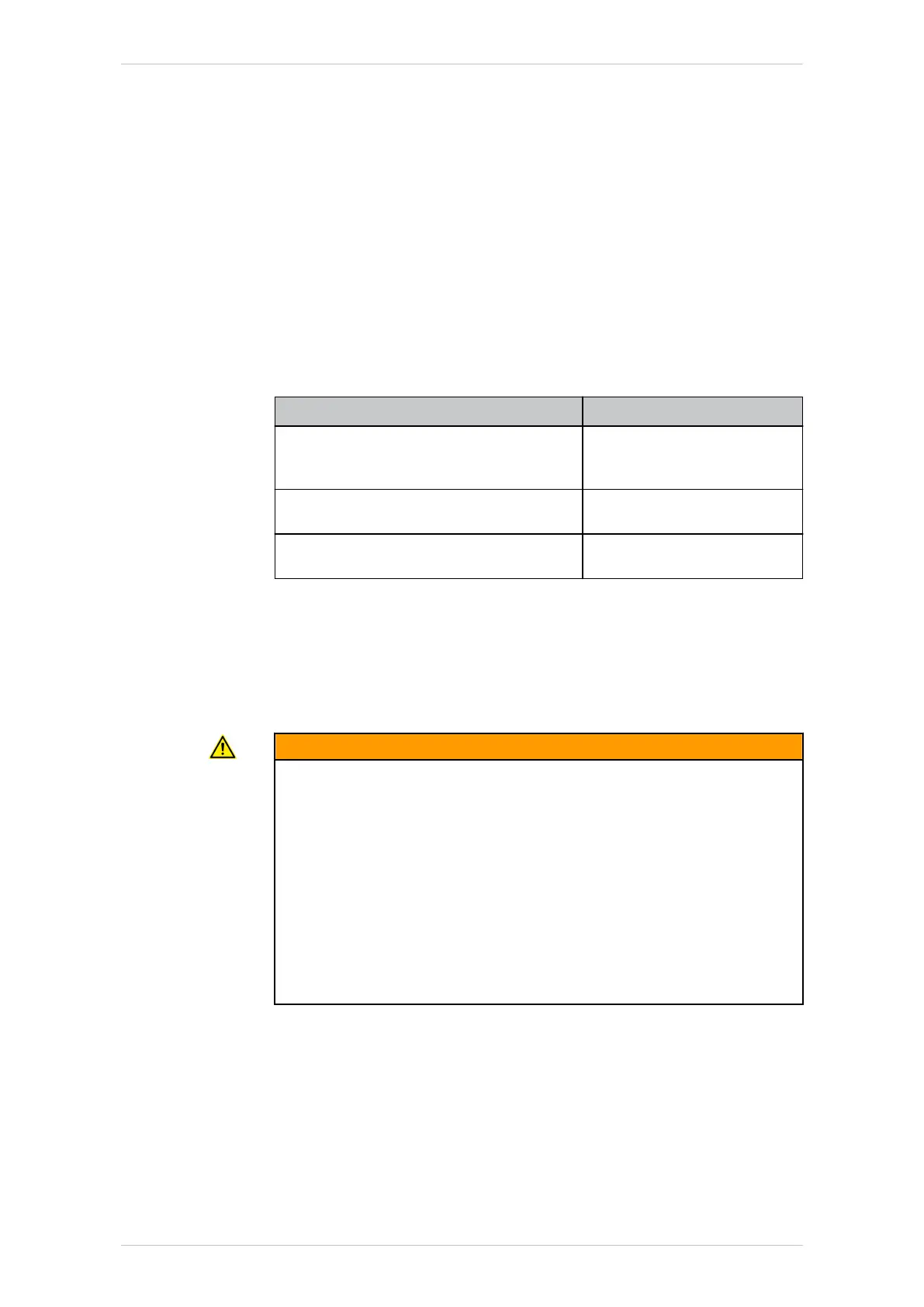
Equipment
The following equipment is required:
Designation Article number
Lifting tackle/rope sling with sufficient
load-bearing capacity and suitable lifting
accessory
-
Crane or fork lift truck with adequate car-
rying capacity
-
Torque wrench
min. 600 to 1000 Nm
-
Precondition
• The removal site must be accessible with a crane or with a fork lift
truck for transportation.
• There is no hazard posed by system components.
Work safety
WARNING
Danger to life and limb due to unintended robot motions
When carrying out the following work, the robot must be moved several
times between the individual work steps. Unintended robot motions may
result in death, severe injuries or damage to property.
• While work is being carried out on the robot, it must always be se-
cured by activating the EMERGENCY STOP device.
• If work is carried out on an operational robot that is switched on, the
robot must only be moved at reduced velocity. It must be possible to
stop the robot at any time by activating an EMERGENCY STOP de-
vice. Operation must be limited to what is absolutely necessary.
• Warn all persons concerned before switching on and moving the ro-
bot.
10.1.1 Moving the robot into its transport position
Procedure
1. Secure the robot by pressing the EMERGENCY STOP device.
2. Remove tools and equipment.
3. Put the robot into operation and move it into the transport position
(>>> Fig. 10-1).
KR IONTEC
MA KR IONTEC V4 | Issued: 11.05.2021 www.kuka.com | 311/344
Decommissioning, storage and disposal

 Loading...
Loading...

