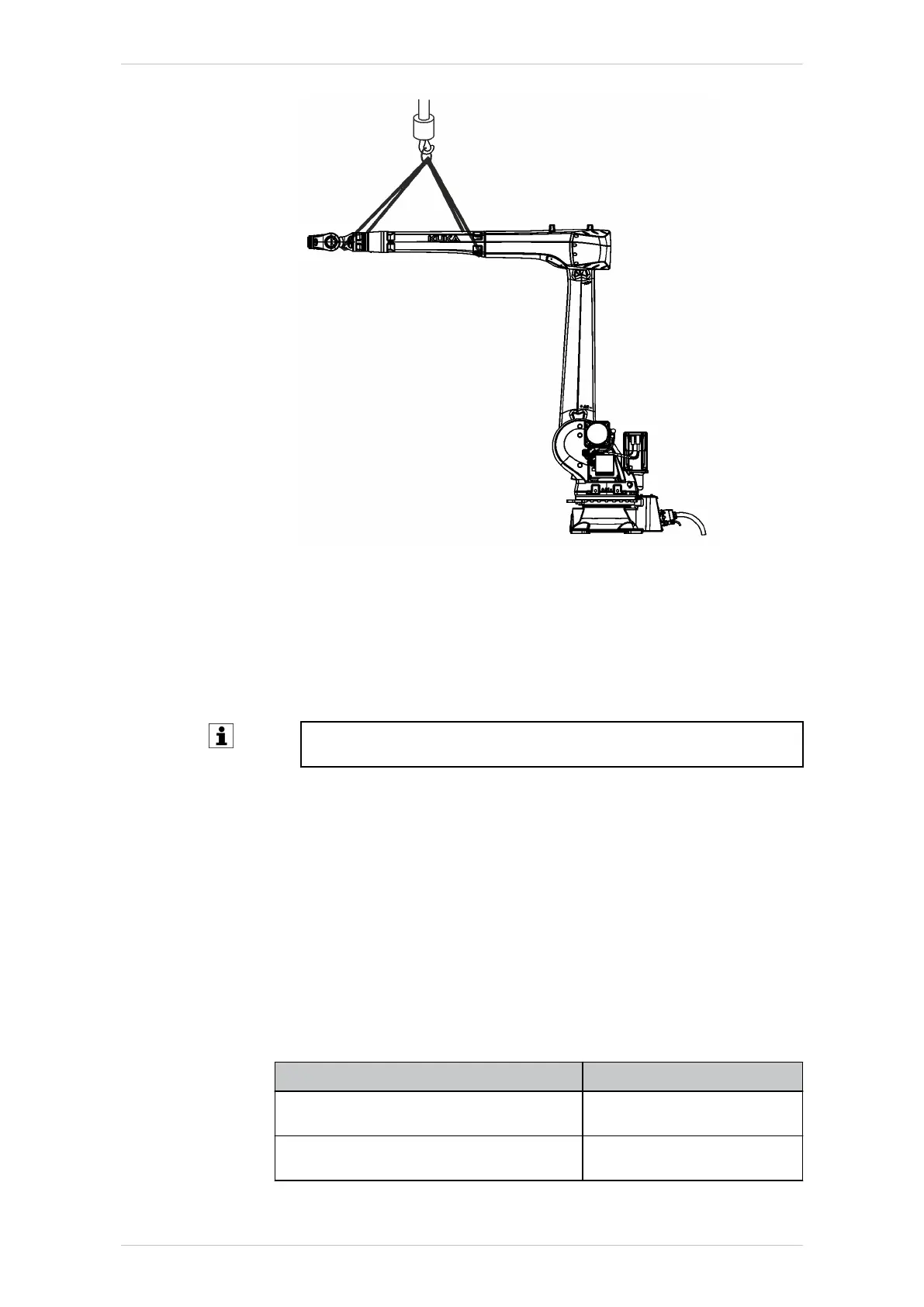
Fig. 9-44: Securing robot arm
9.5.3.12 Concluding work
The following concluding work must be carried out:
• Move A4, A5 and A6 of the robot and look out for irregularities.
• Carry out mastering of A4, A5 and A6.
Detailed information about mastering is contained in the operating
and programming instructions for end users or system integrators.
• Test the program in Manual Reduced Velocity mode (T1).
9.5.4 Exchanging the connecting shafts
Description
The following instructions describe the exchange of connecting shafts A4
and A5. The connecting shafts must always be exchanged as a pair. This
description applies to floor-mounted robots. If the robot is installed in an
inclined or suspended position, the procedure is to be applied analogously.
Equipment
The following equipment is required:
Designation Article number
Lifting tackle / rope sling with sufficient
load-bearing capacity
-
Crane with sufficient load-bearing capaci-
ty
-
KR IONTEC
MA KR IONTEC V4 | Issued: 11.05.2021 www.kuka.com | 285/344
Repair

 Loading...
Loading...

