XtraDrive User Manual Appendix D: List of Parameters
D-3
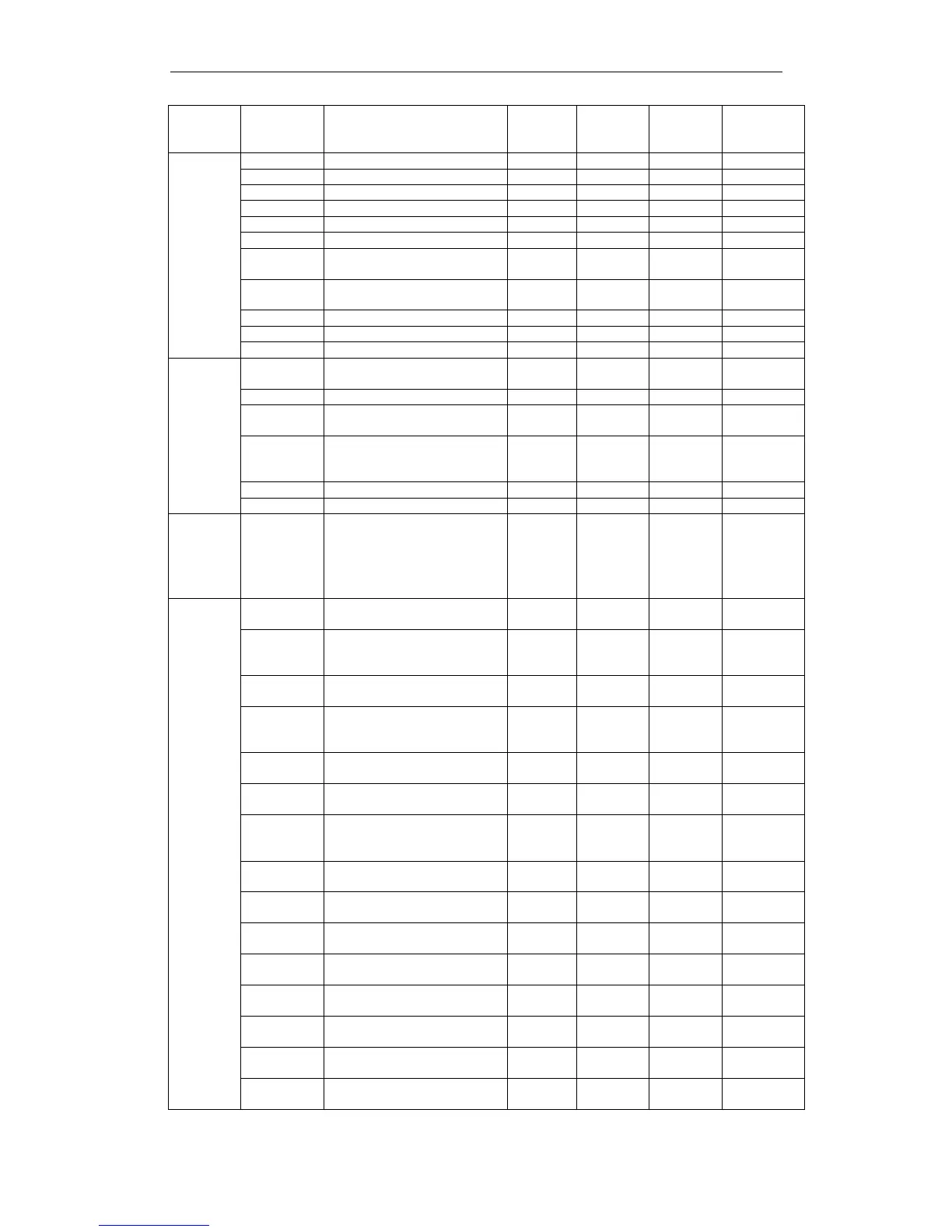
Category
Parameter
Number
Name
Unit
Setting
Range
Default
Setting
Reference
Pn1AC Speed feedback gain Hz 0-2000 80 6.3.3
Pn1AD Acceleration feedback gain % 0-500 0 6.3.3
Pn1AE Acceleration feedback filter 0.01ms 0-2500 300 6.3.9
Pn1AF Feed forward gain % 0-200 0 6.3.3
Pn1B5 Maximum variable gain % 100-1000 160 6.3.7
Pn1BB Feed forward compensation Hz 10-2000 2000 6.3.4
Pn1BC
Filter on command
acceleration
0.01ms 0-2500 300 6.3.4
Pn1BD
Reduction of vibrations due to
system flexibility.
Hz 10-2000 2000 6.3.4
Pn1BF Integral switch advance -- 1-15 3 6.3.8
Pn1C0 Integral offset averaging time ms 0-25 0 6.3.7
Gain Parameters
Pn1C1 Integral switch advance 125us 0-8 3
Pn200*
Position Control Reference
Selection Switches
— — 0000 5.2.2
Pn201*
PG Divider (rotary motor) p/r 0 to 65635 2048 5.2.3
Pn202*
Electronic Gear Ratio
(Numerator)
— 1 to 65535 4 5.2.5
Pn203*
Electronic Gear Ratio
(Denominator)
(See note 3).
— 1 to 65535 1 5.2.5
Pn205*
Multi-Turn Limit Setting
2
rev 0 to 65535 65535 5.7.2
Position Parameters
Pn216 Command smoothing 0.1ms 0-65535 0 6.3.4
Linear
Motor
Position
parameter
Pn281*
PG Divider
Counts /
Scale
Pitch
1-256 1
Pn2A2*
Work speed default (low)
Speed
units
0-65535 0 5.9.1.2
Pn2A3*
Work speed default (high)
Speed
units*
65536
0-256 0 5.9.1.2
Pn2A4*
Work acceleration default
(low)
Accelera-
tion units
0-65535 0 5.9.1.2
Pn2A5*
Work acceleration default
(high)
Accelera-
tion units*
65536
0-256 0 5.9.1.2
Pn2A6*
Work jerk smoothing time
default
µs 0-63999 0 5.9.1.2
Pn2A8*
Quick stop deceleration (low)
Accelerati
on units
0-65535 65535 5.9.1.2
Pn2A9*
Quick stop deceleration (high)
Accelera-
tion units*
65536
0-256 256 5.9.1.2
Pn2B0*
Position units ratio numerator
(low)
-- 1-65535 1 5.9.1.1
Pn2B1*
Position units ratio numerator
(high)
-- 0-16383 0 5.9.1.1
Pn2B2*
Position units ratio
denominator (low)
-- 1-65535 1 5.9.1.1
Pn2B3*
Position units ratio
denominator (high)
-- 0-16383 0 5.9.1.1
Pn2B4*
Speed units ratio numerator
(low)
-- 1-65535 1 5.9.1.1
Pn2B5*
Speed units ratio numerator
(high)
-- 0-16383 0 5.9.1.1
Pn2B6*
Speed units ratio denominator
(low)
-- 1-65535 1 5.9.1.1
Serial communication command
Pn2B7*
Speed units ratio denominator
(high)
-- 0-16383 0 5.9.1.1