Setting functions
8.5 Motor control
Inverter with CU230P-2 Control Units
Operating Instructions, 11/2013, FW V4.6.6, A5E02430659B AG
257
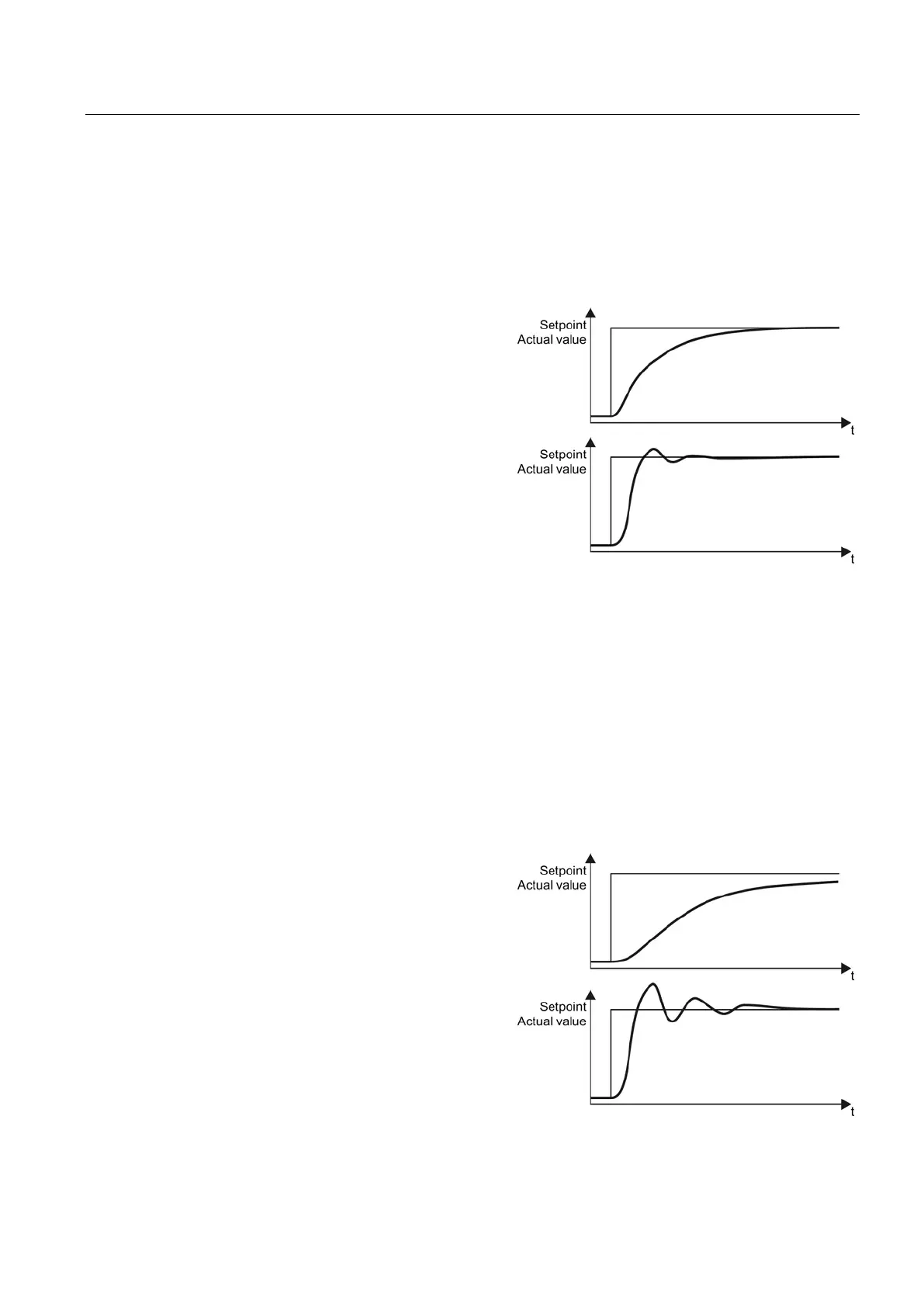
Optimizing the speed controller
Optimum control response - post optimization not required
You do not have to manually adapt the speed controller if, after the speed controller self
optimization, the motor manifests the following acceleration response:
Optimum control response for
applications that do not permit any
overshoot.
The actual value approaches the
setpoint without any significant
overshoot.
Optimum control response for fast
correction and quick compensation of
noise components
.
The actual value approaches the
setpoint and slightly overshoots
(maximum 10% of the setpoint step).
Control optimization required
In some cases, the self optimization result is not satisfactory, or the inverter cancels the self-
optimization routine with a fault. Further, self optimization is not permissible in plants and
systems in which the motor cannot freely rotate.
In these cases you must manually optimize the speed controller.
The examples listed below show you which variables you can use to adapt the control
response.
The basic procedure is described in the following paragraph for STARTER and BOP-2.
● K
P
(p1470) Proportion share
● T
N
(p1472) Integration time
The actual value only slowly approaches
the setpoint
.
Increase the proportional component
K
P
and reduce the integration
time T
N
.
The actual value quickly approaches the
setpoint, but overshoots too much.
Decrease the proportional
component K
P
and increase the
integration time T
N
.

 Loading...
Loading...






















